|
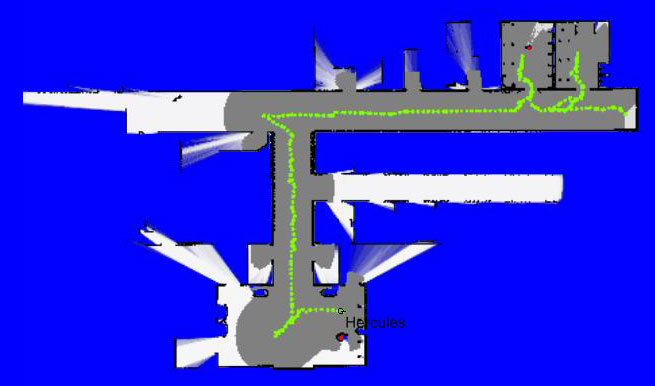
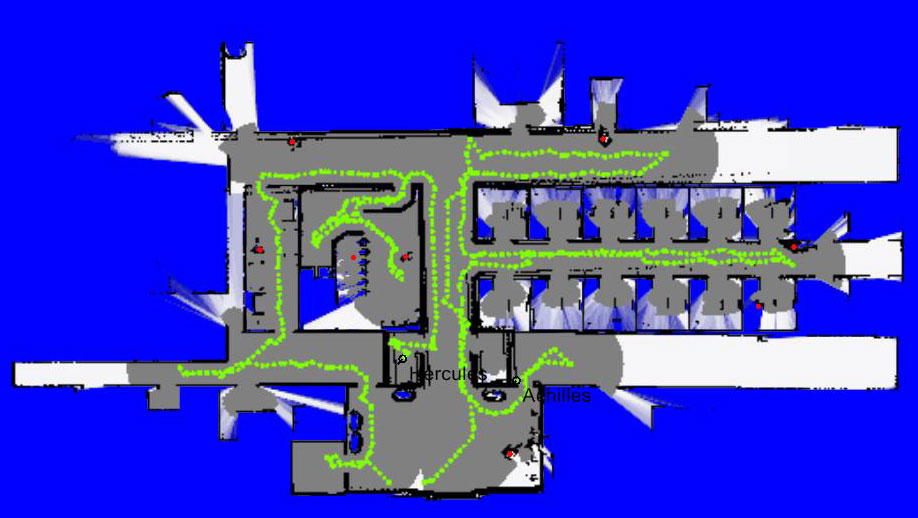
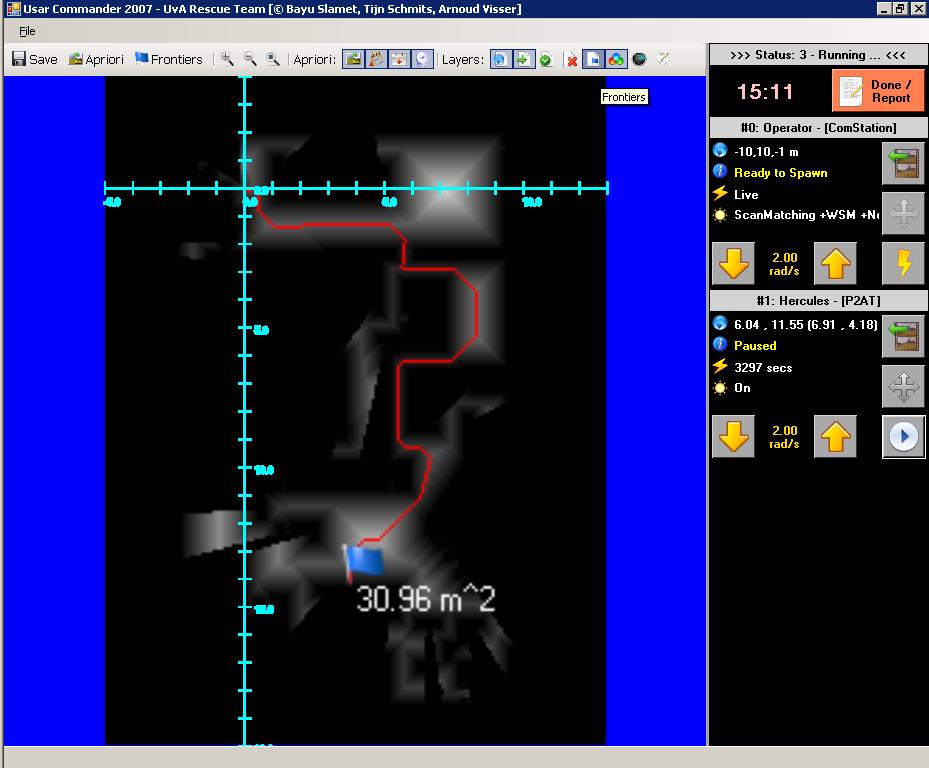
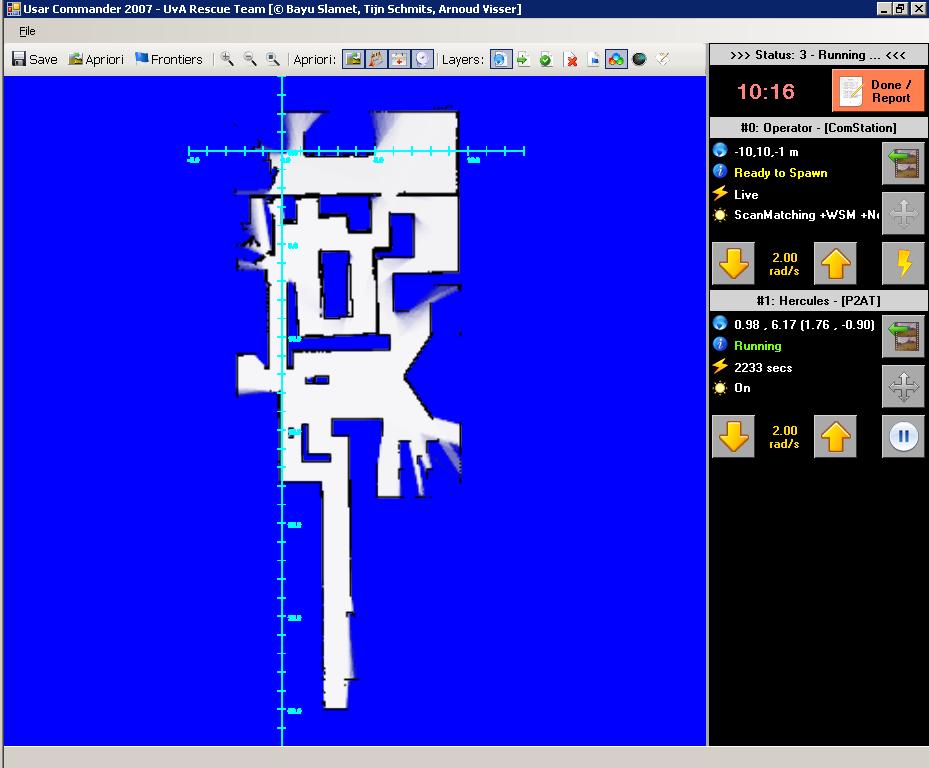
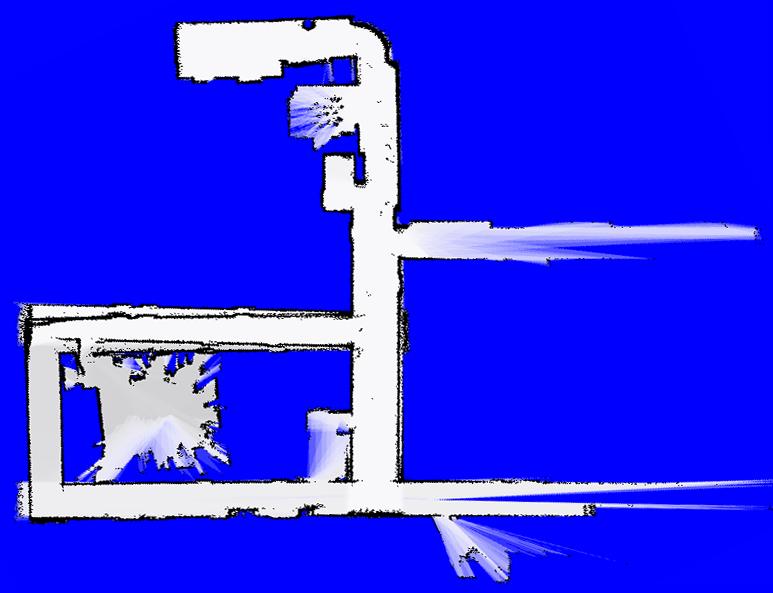
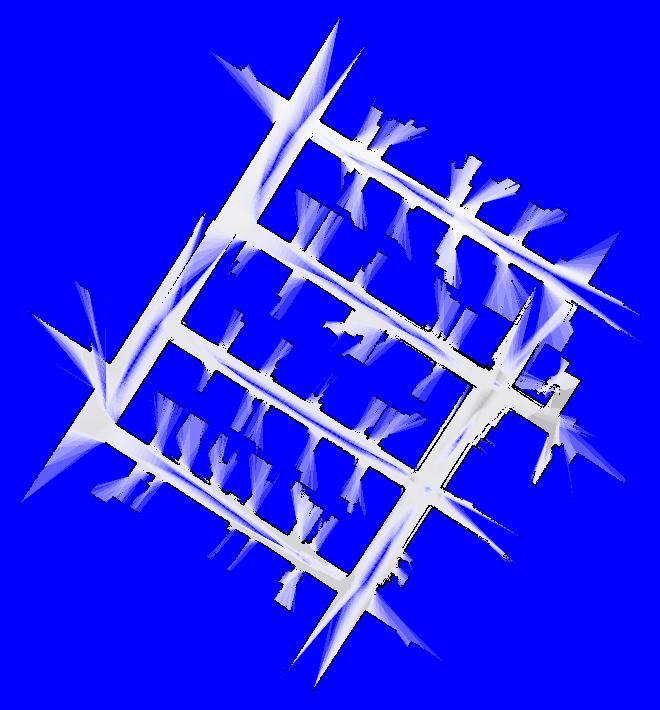
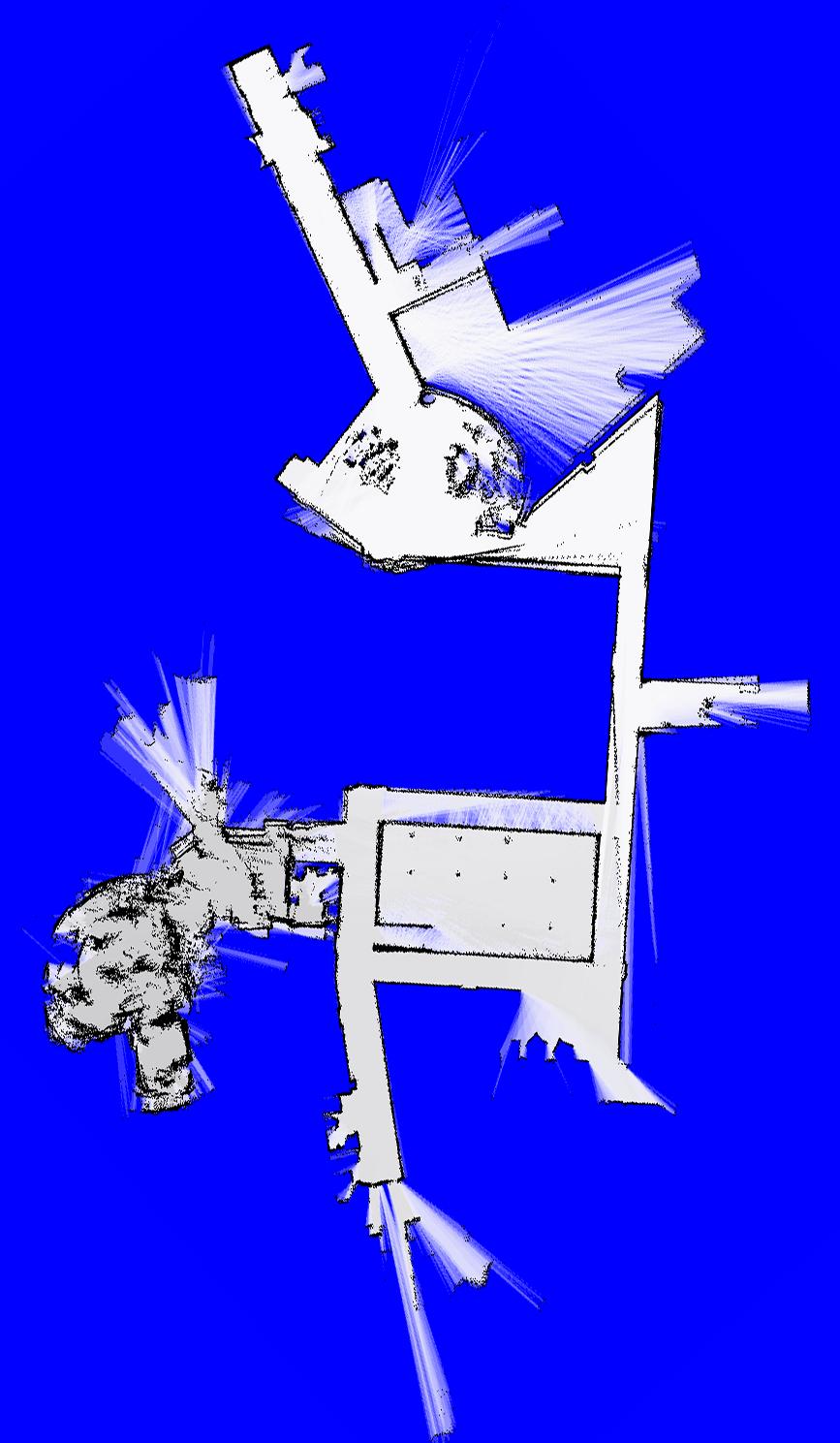
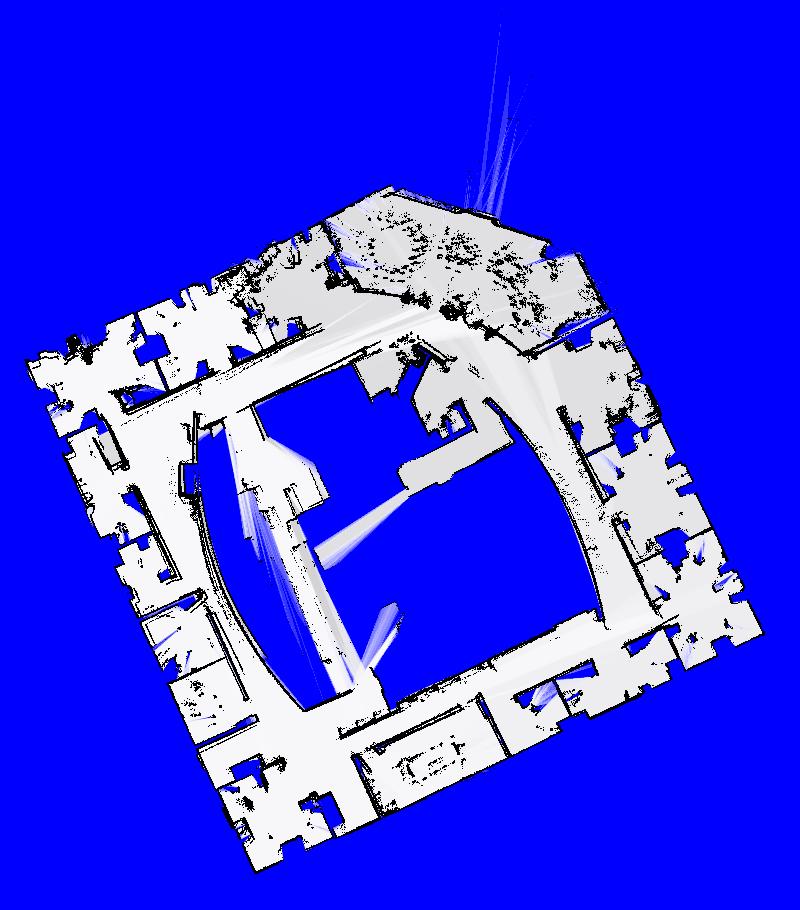
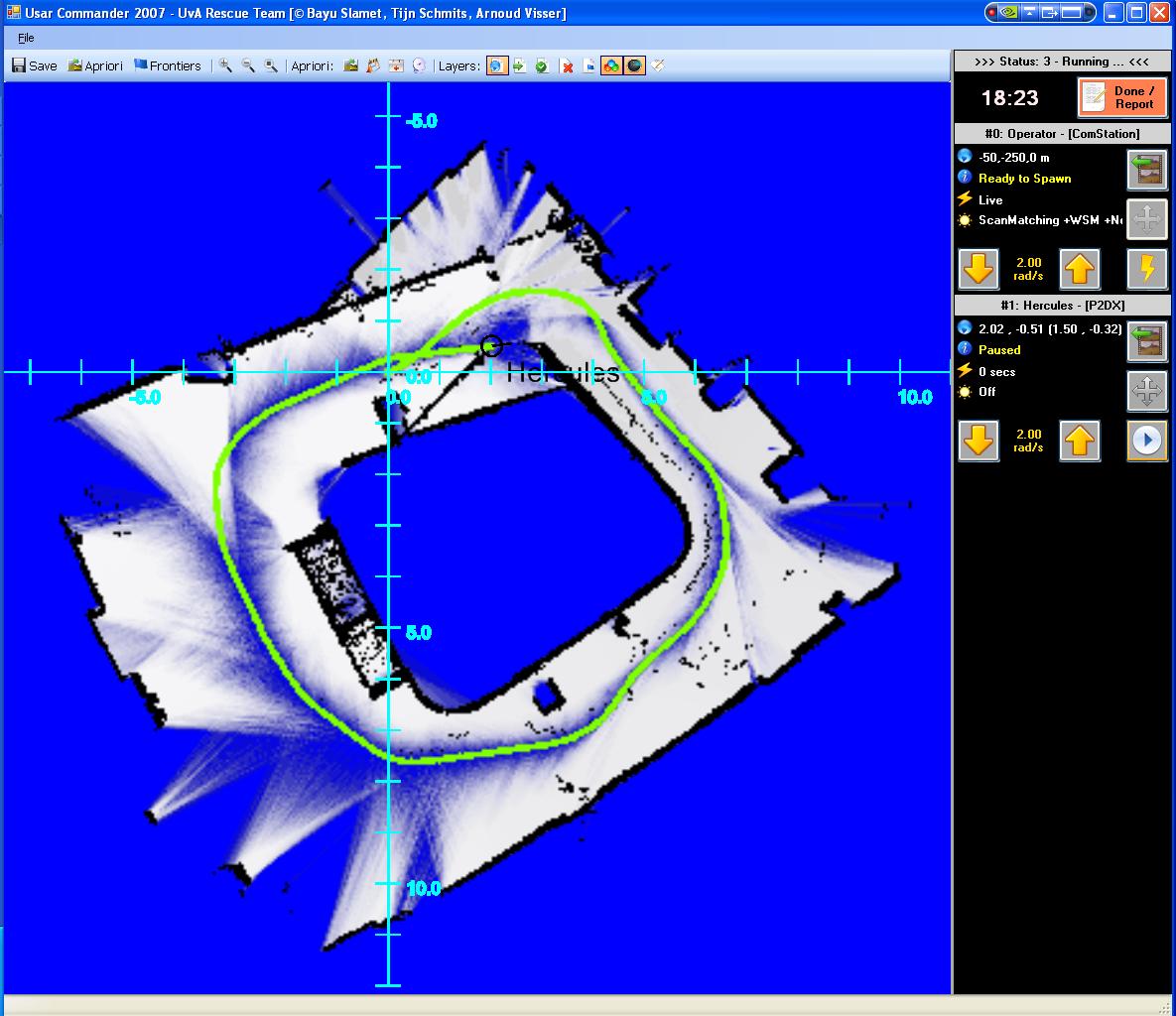
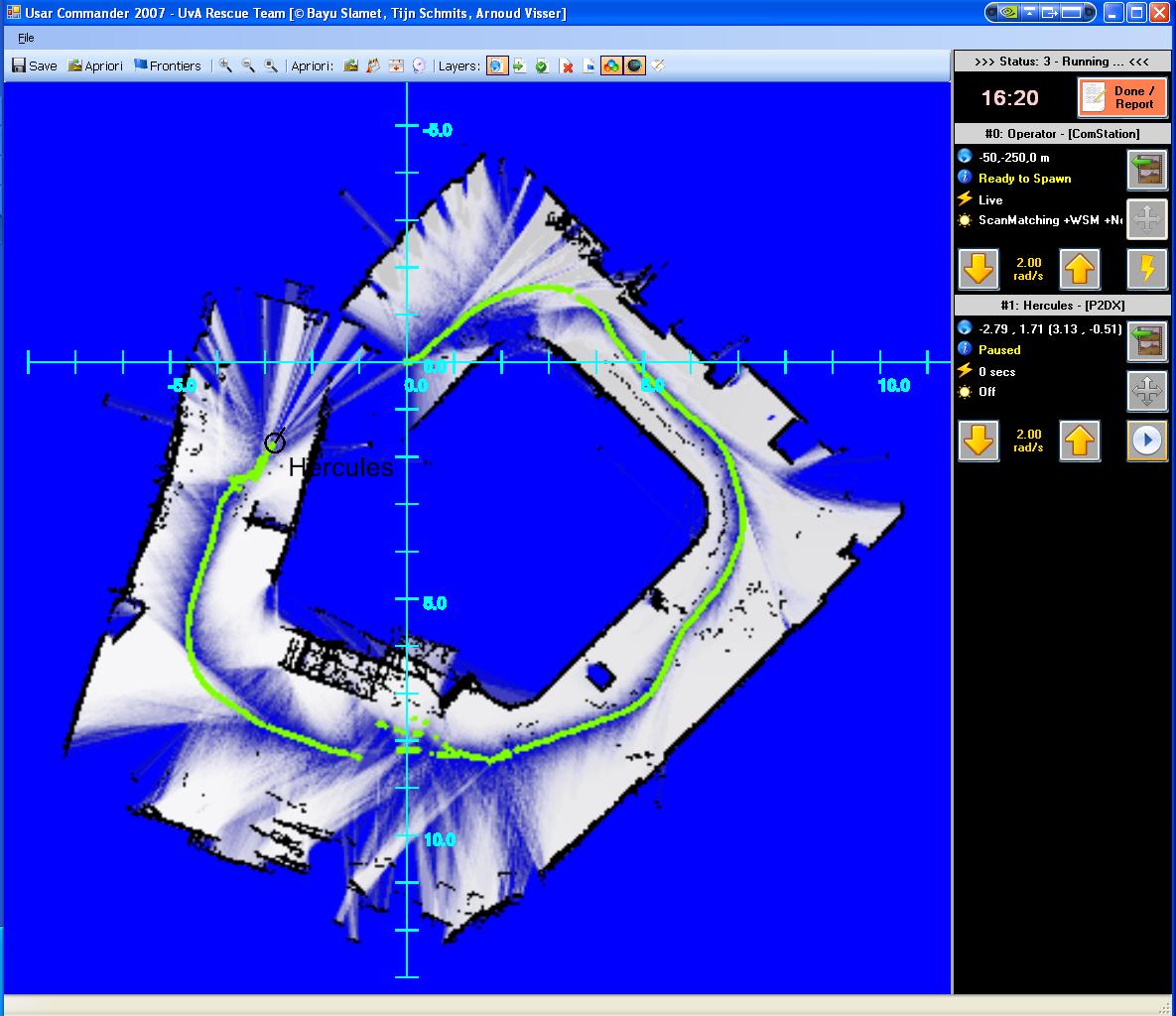
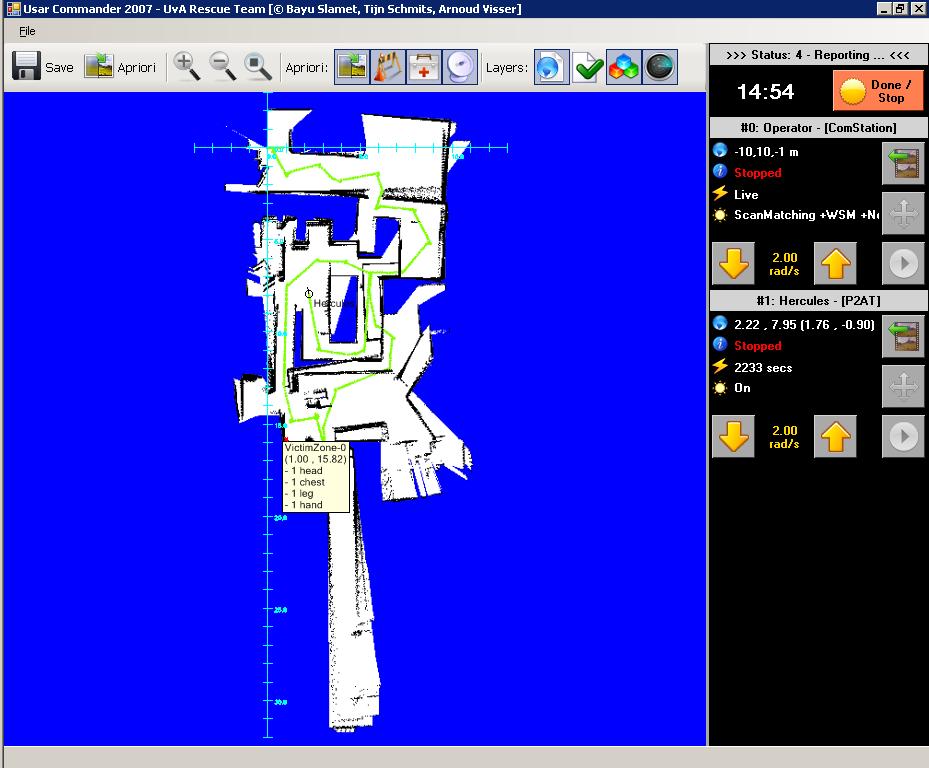
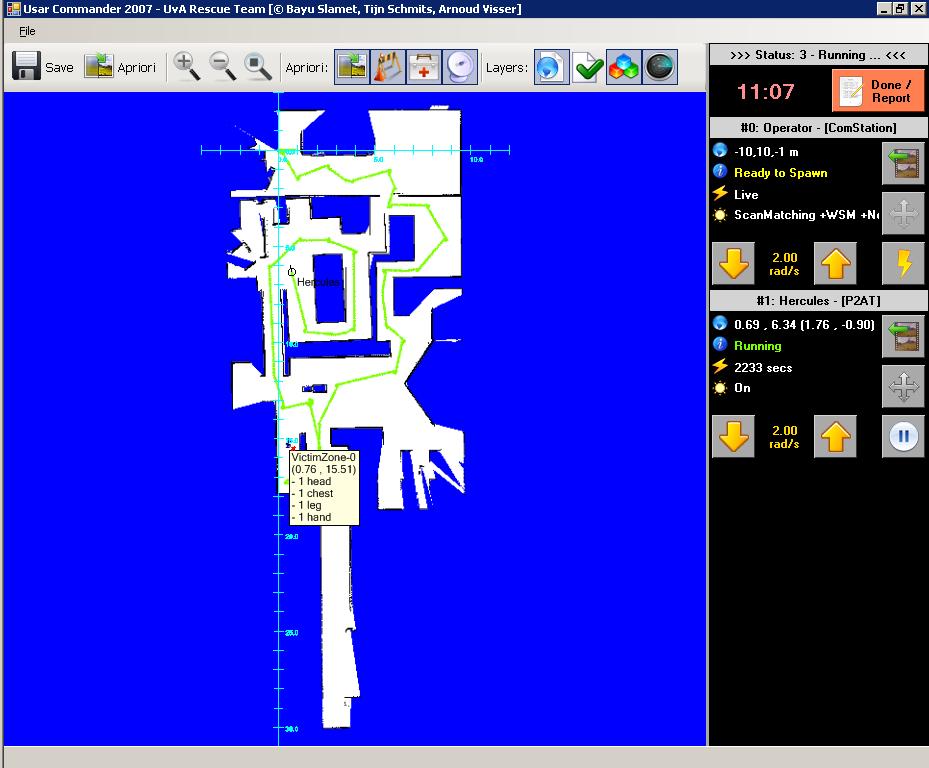
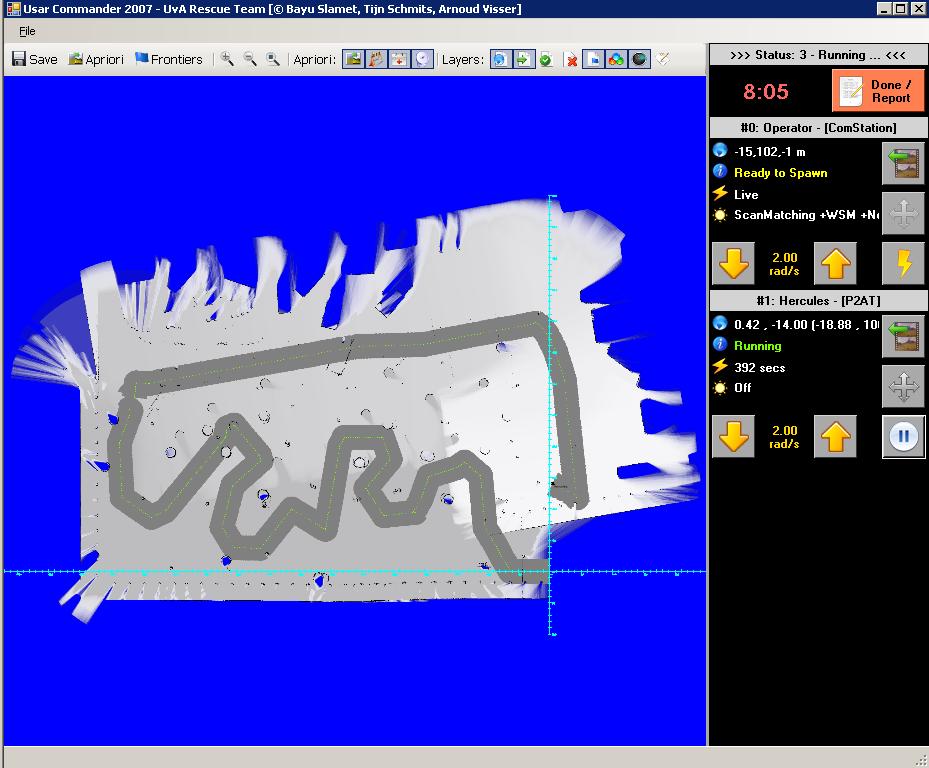
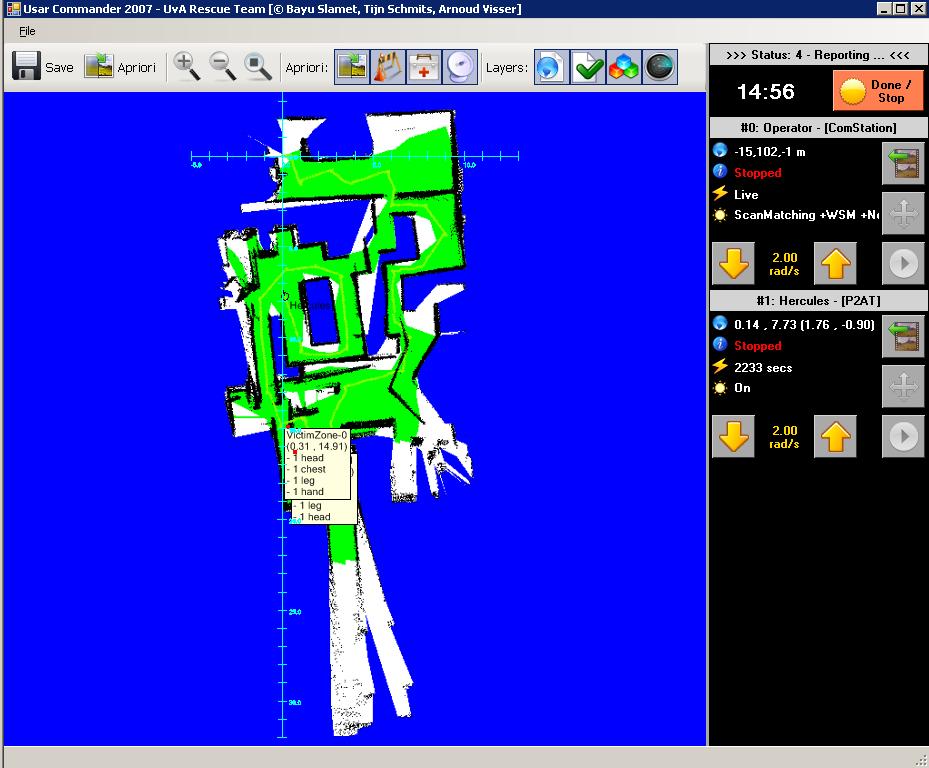
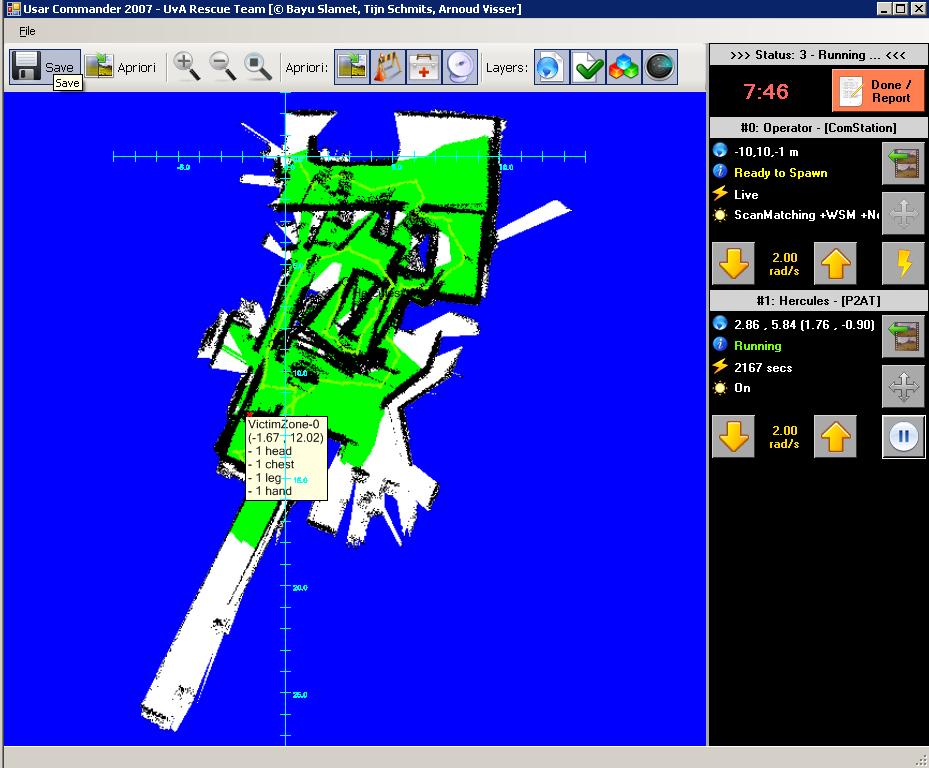
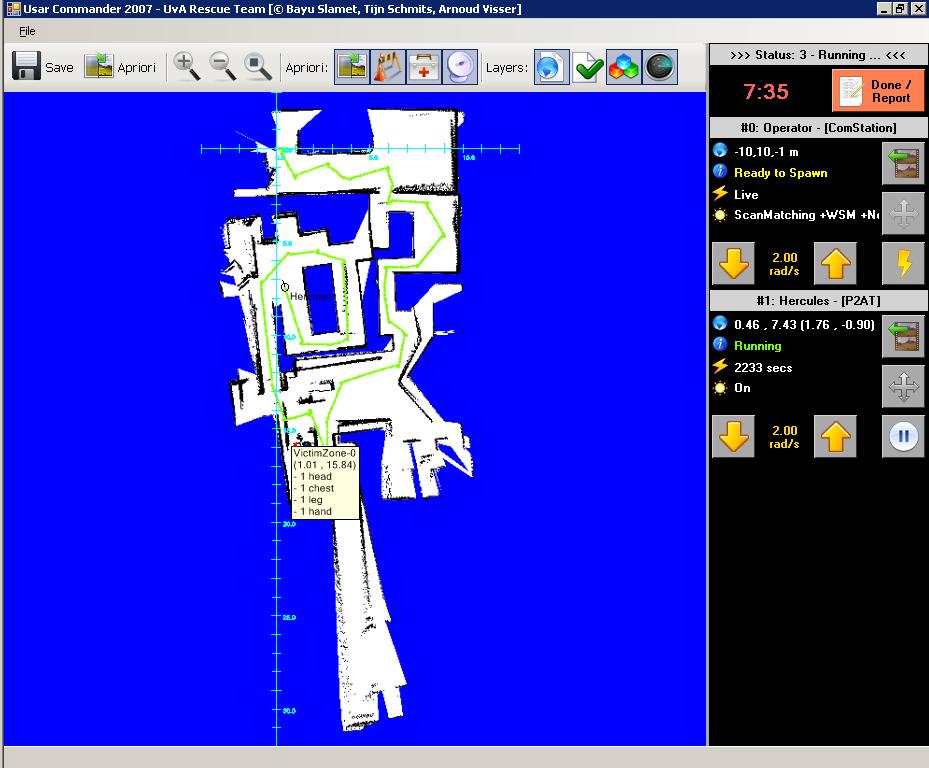
Blue = unexplored area,
White = explored area,
Green = explored area that is cleared of victims,
Black = detected obstacles (walls. furniture, debris, etc.)
|
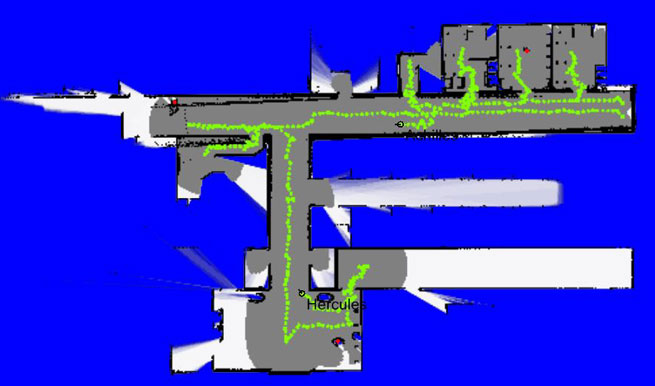
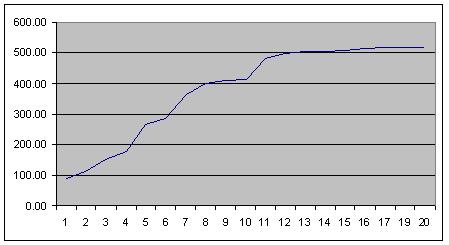
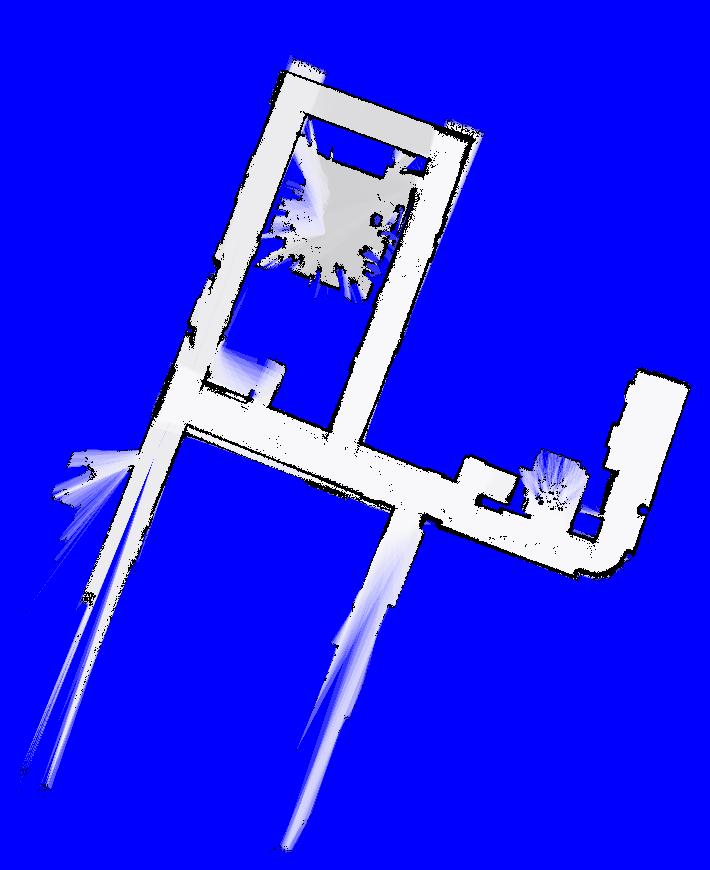
Indoor area, 2 robots, 276 m2.
This very high quality map was acquired in the 3rd preliminary. We deployed 2 Pioneers
that each explored a different part of the building. Their findings have been communicated
to our Operator through the simulated Wireless Communication Server which only has limited band-width.
|
 |
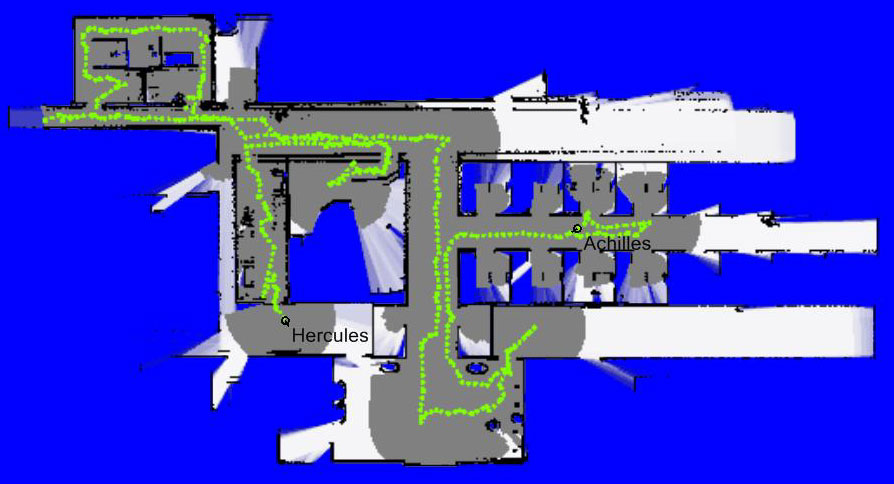
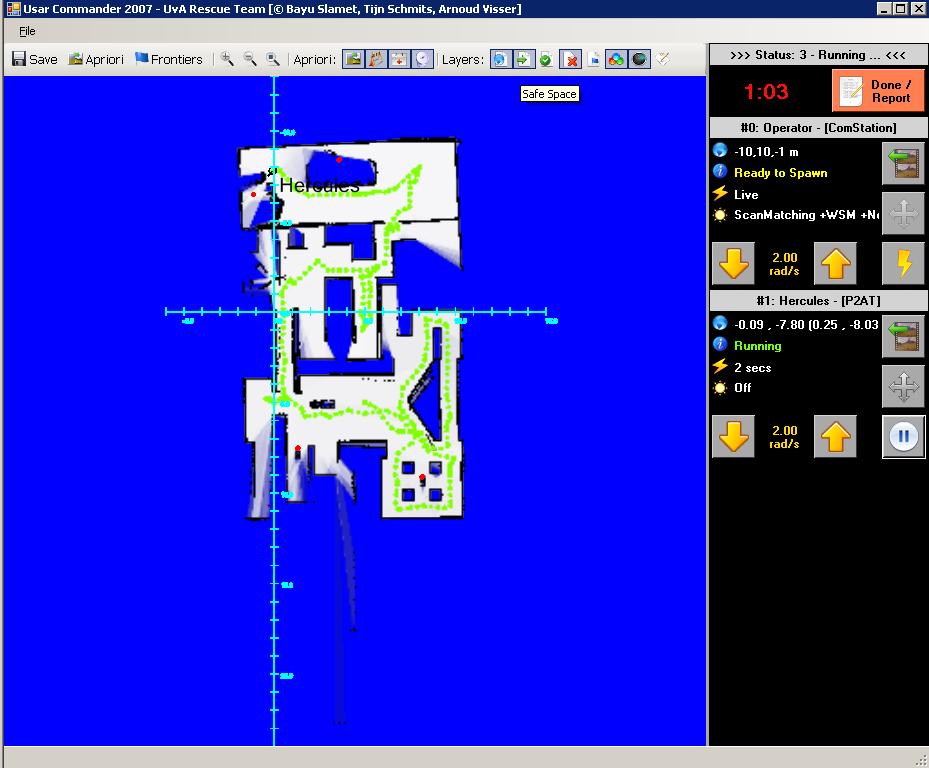
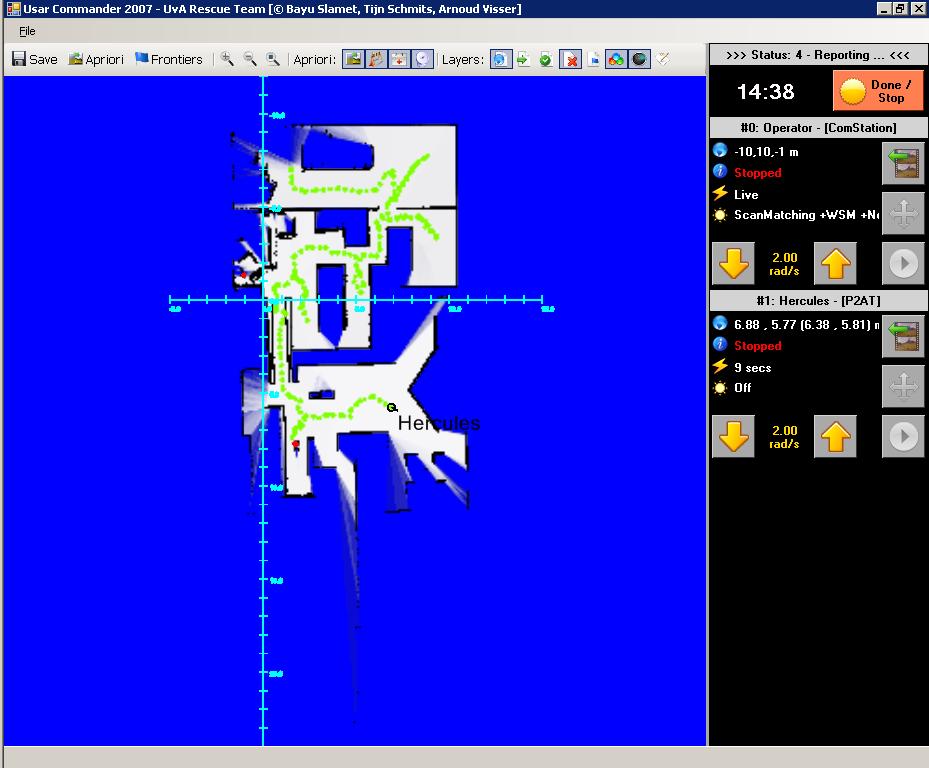
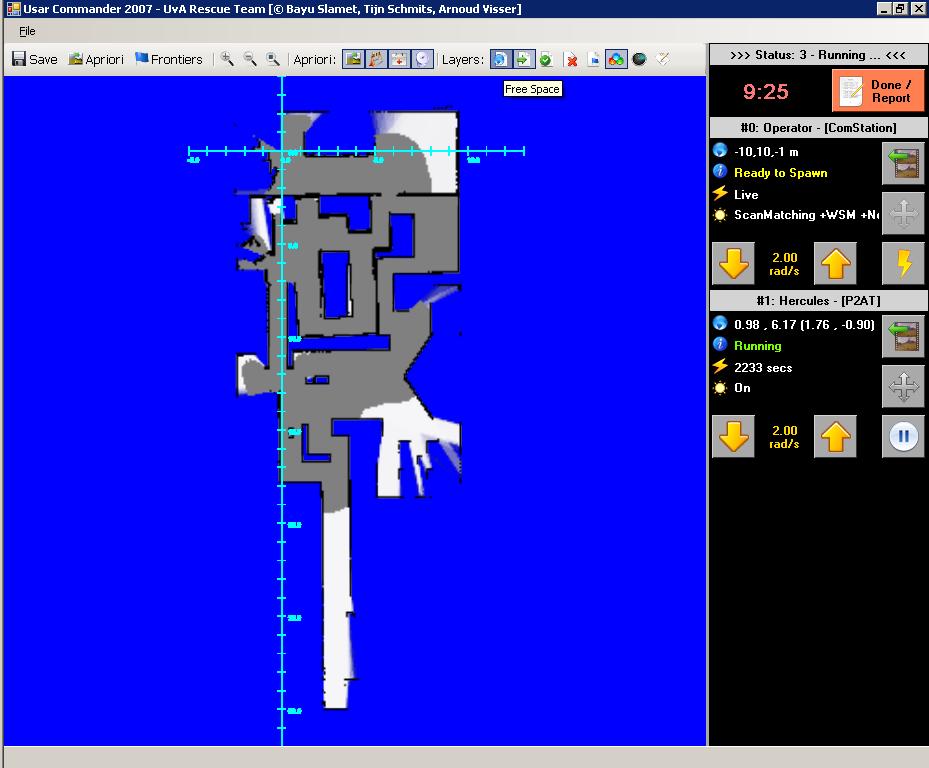
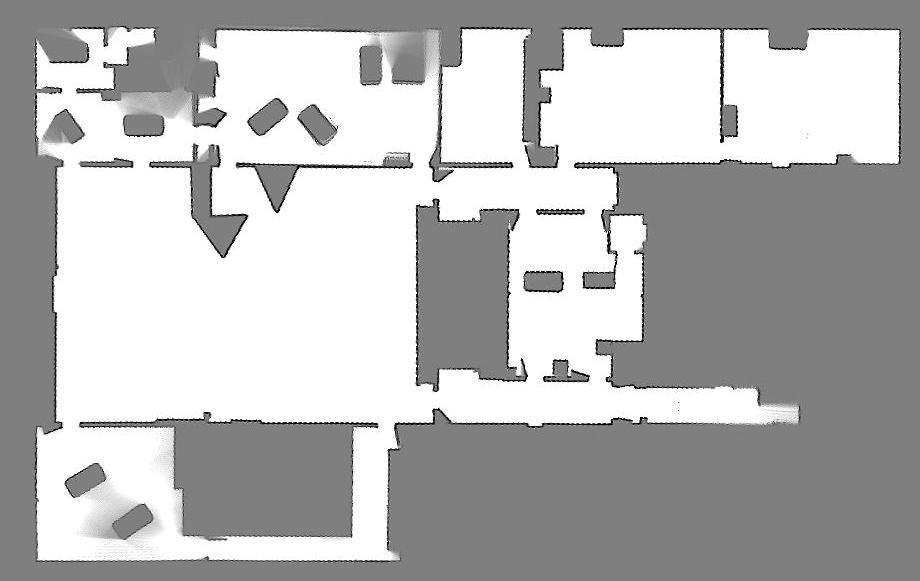
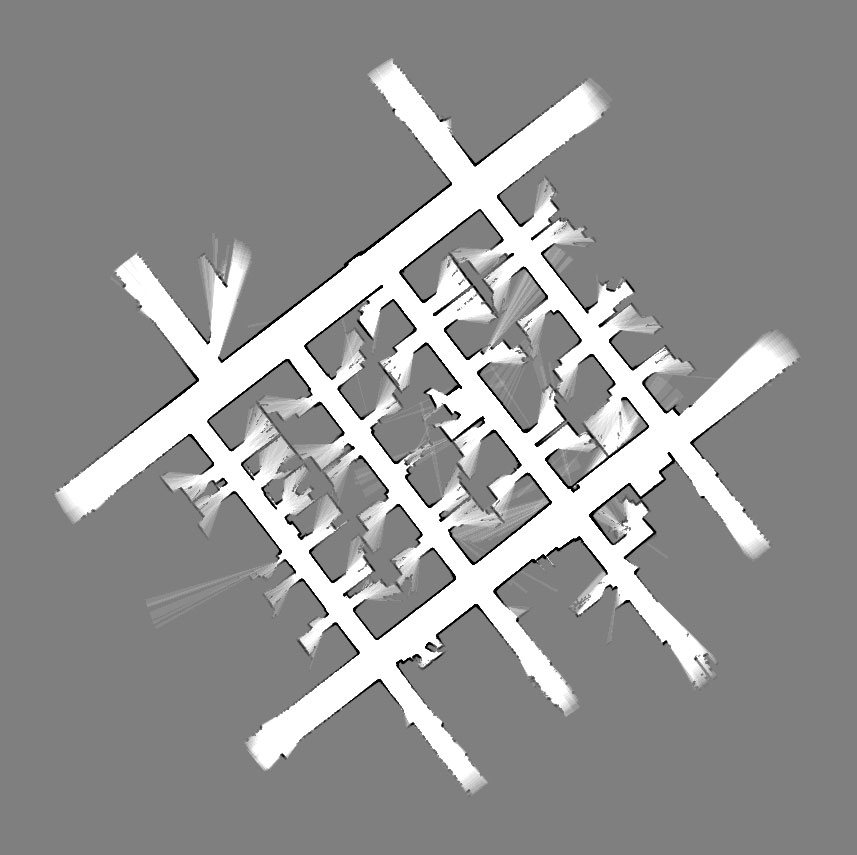
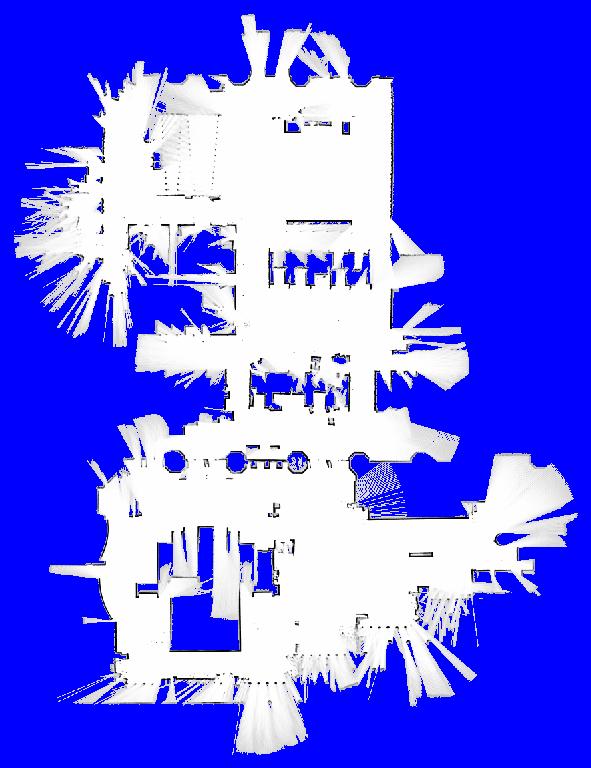
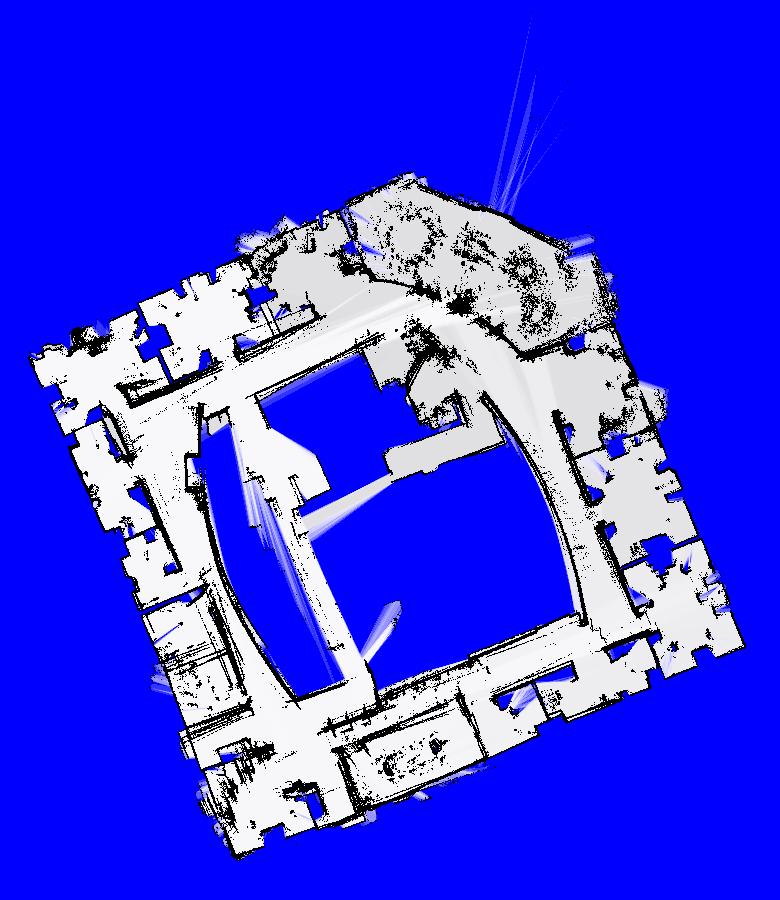
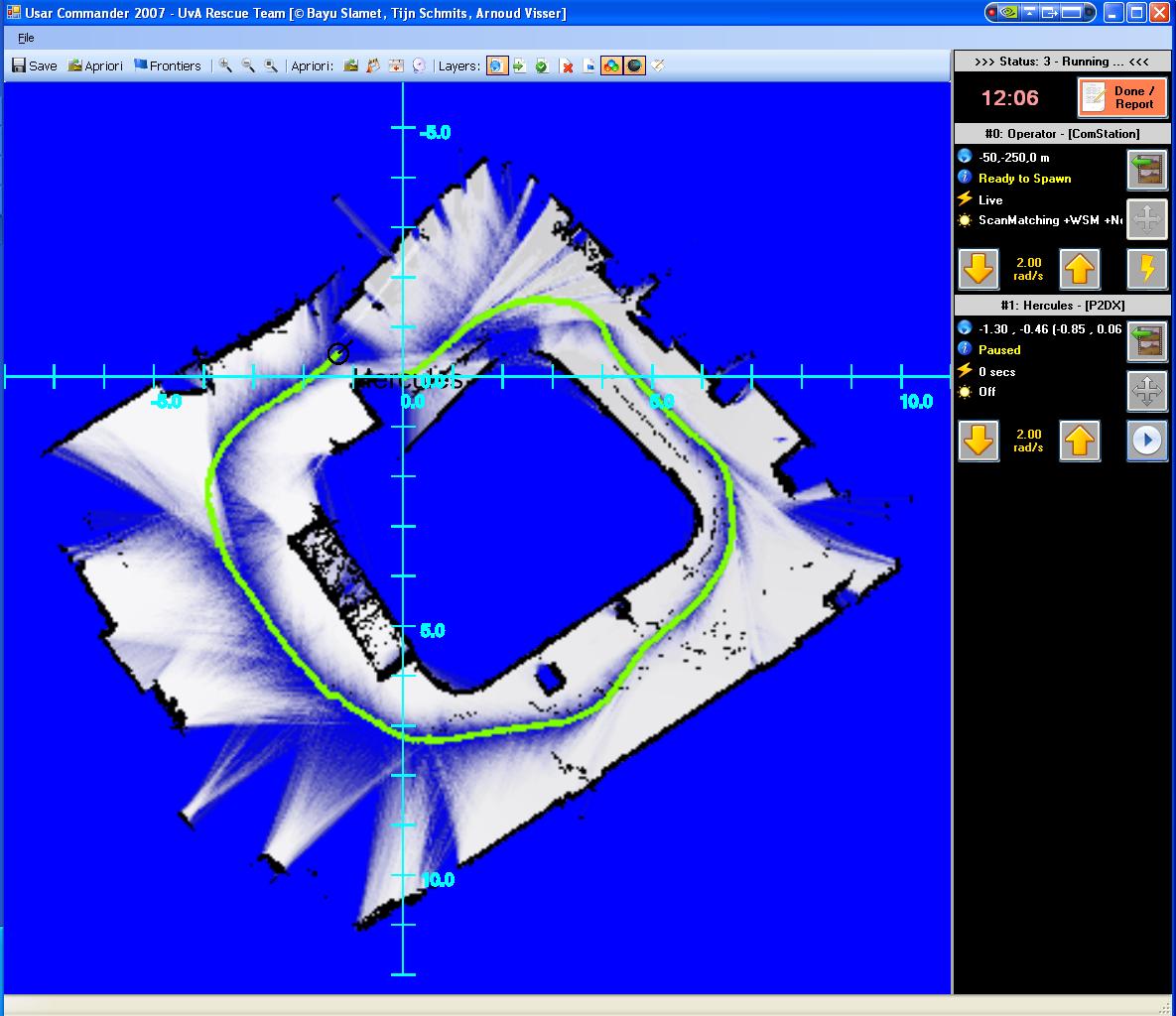
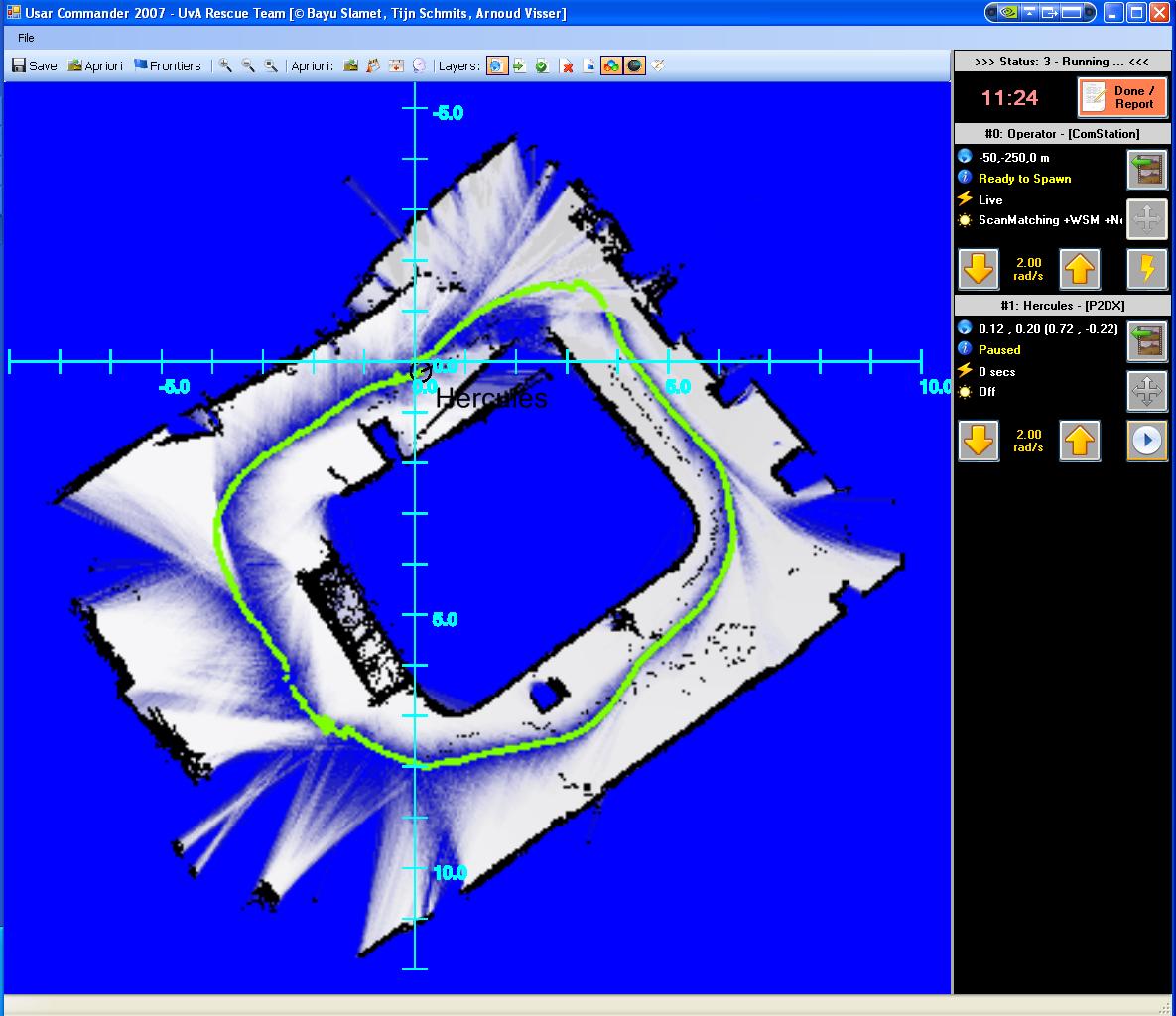
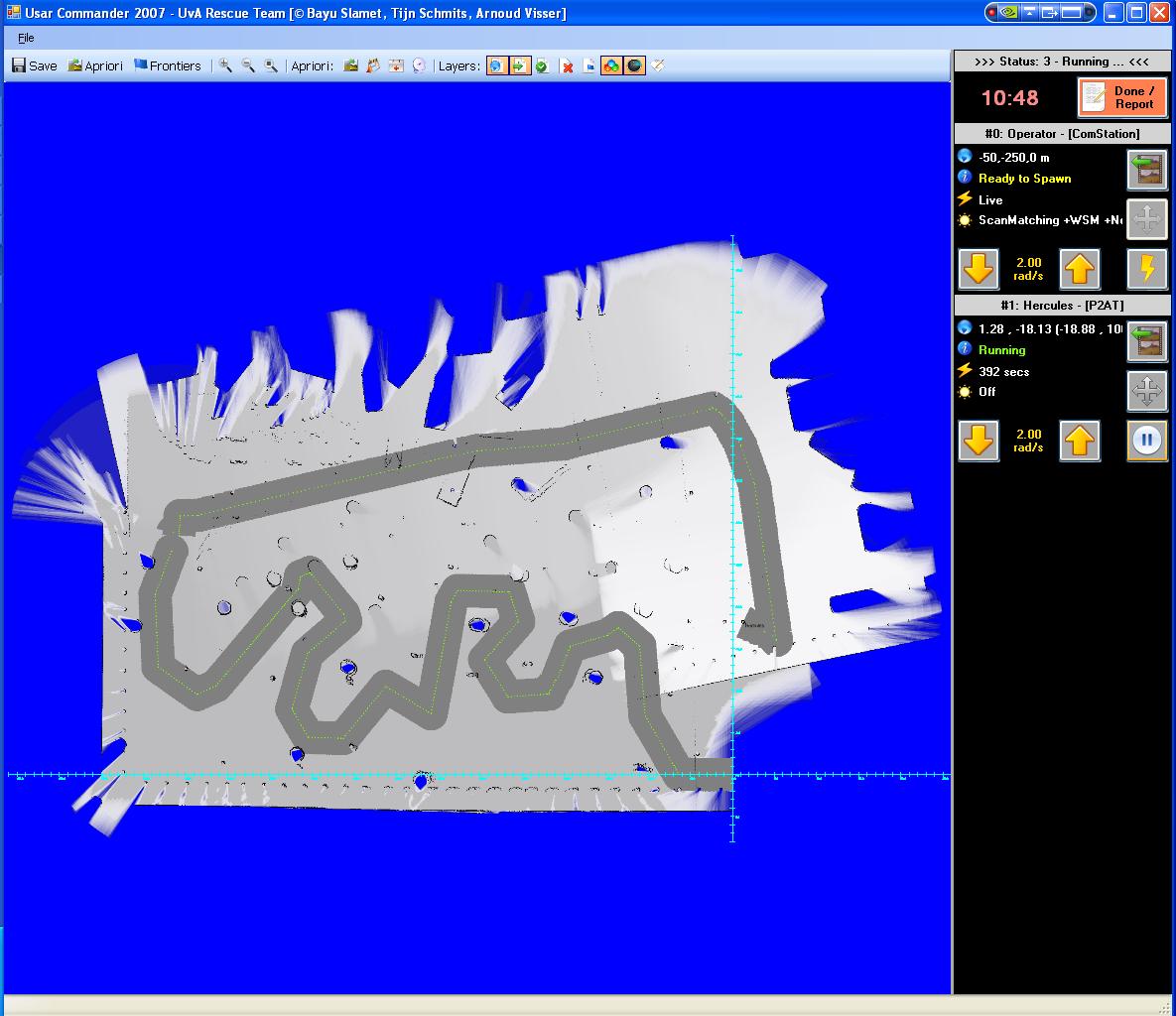
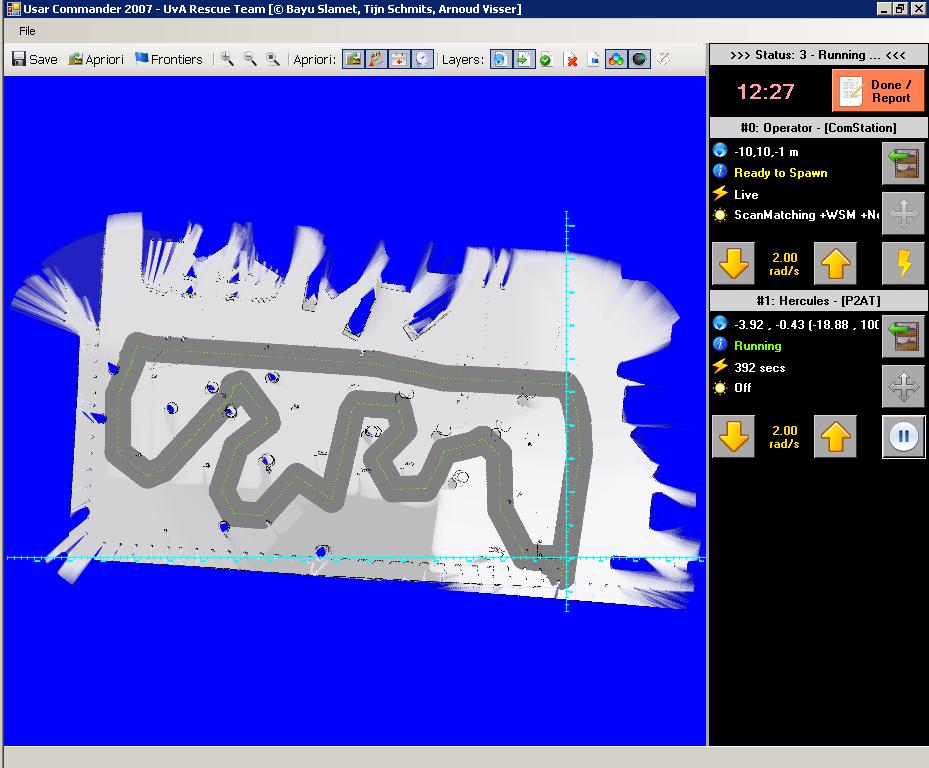
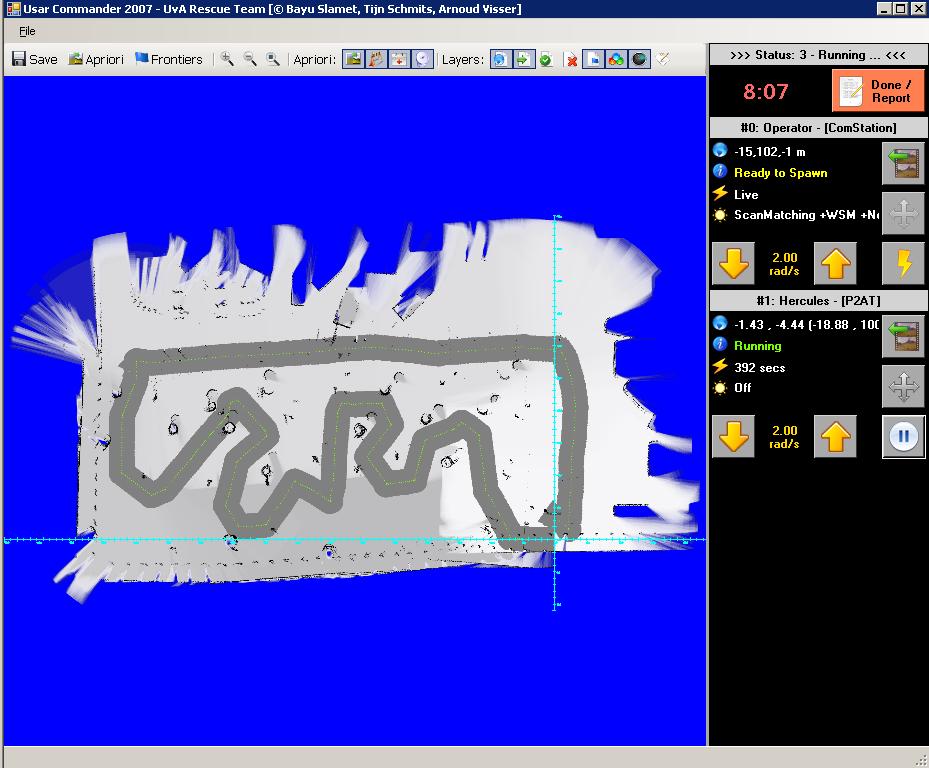
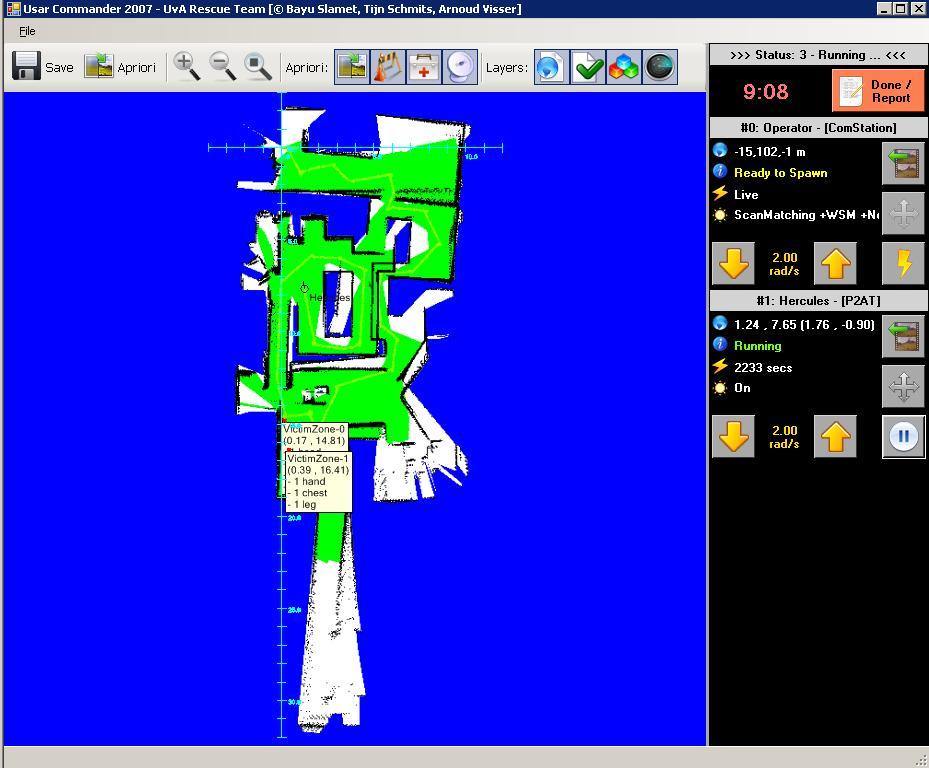
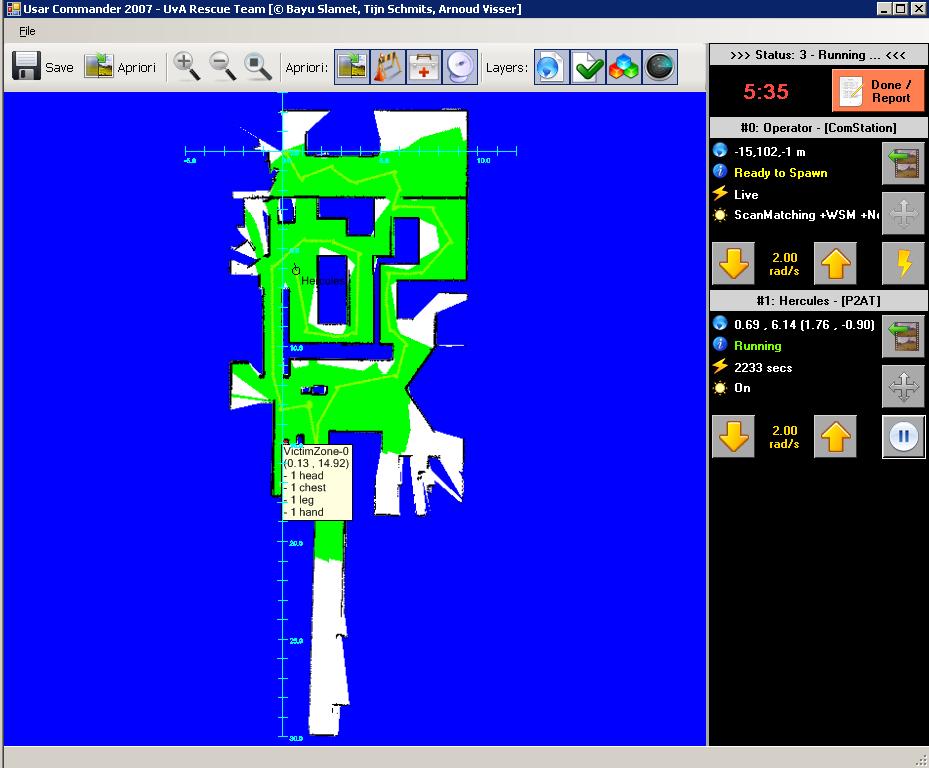
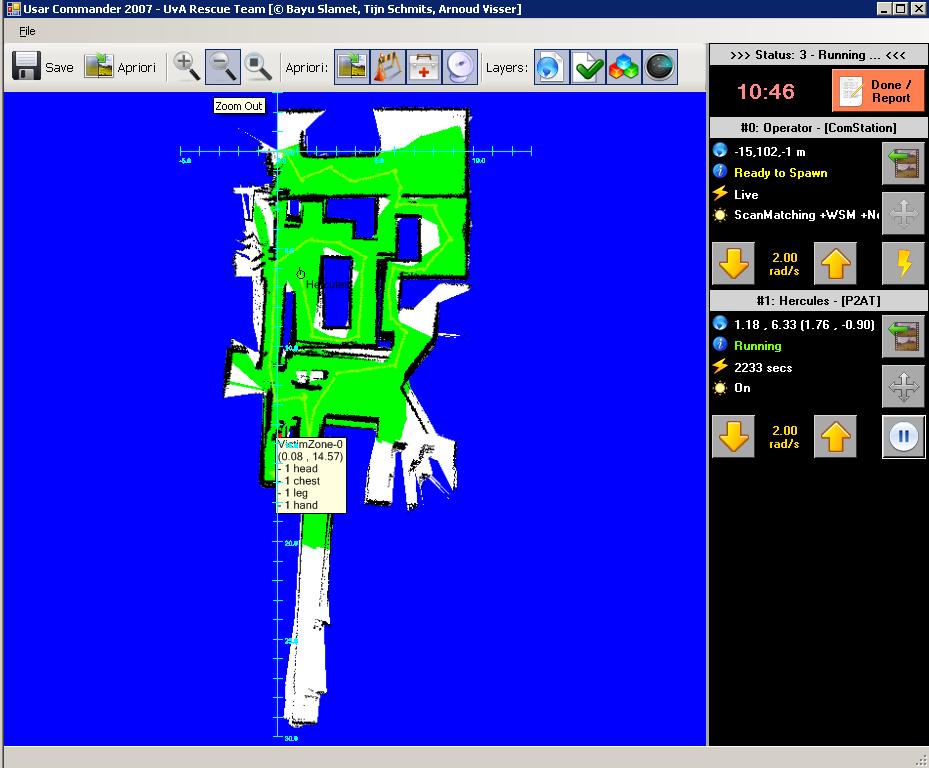
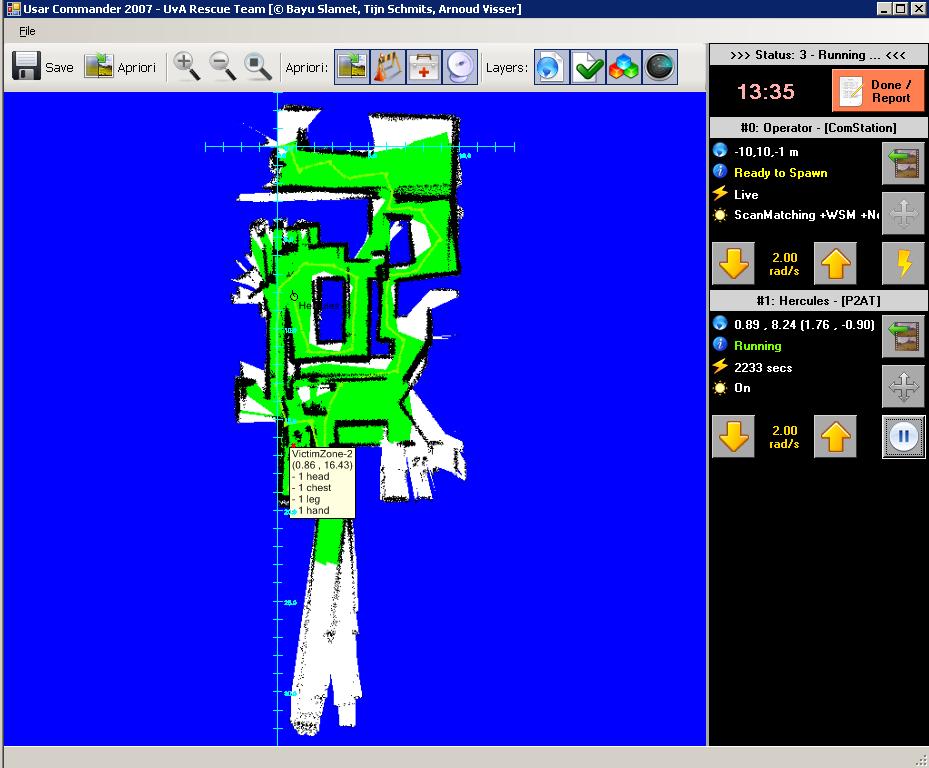
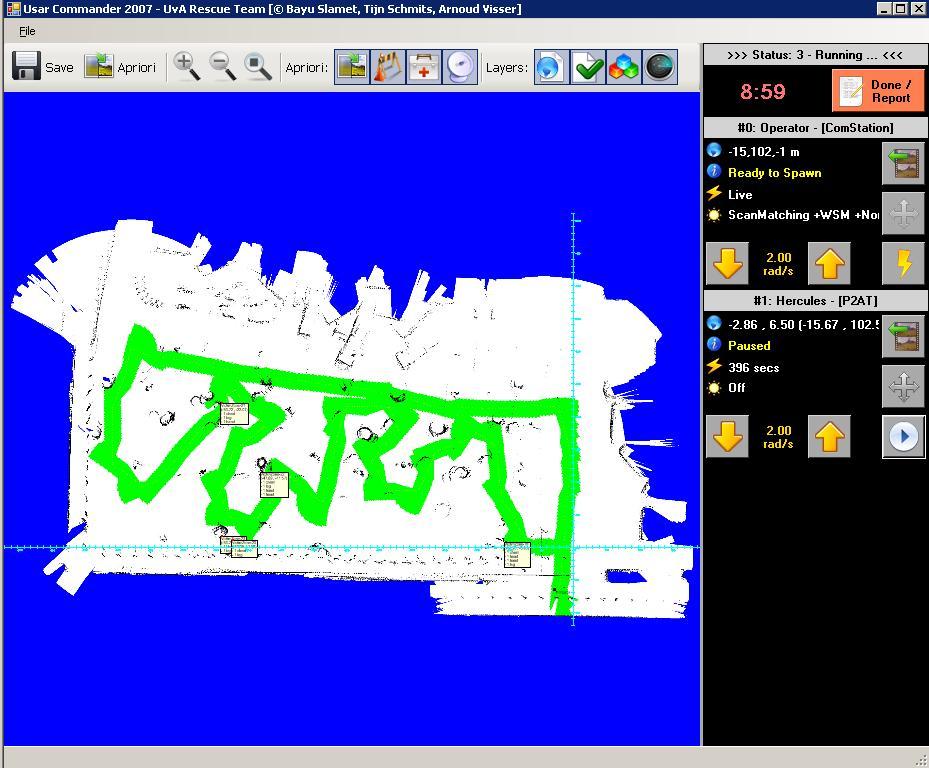
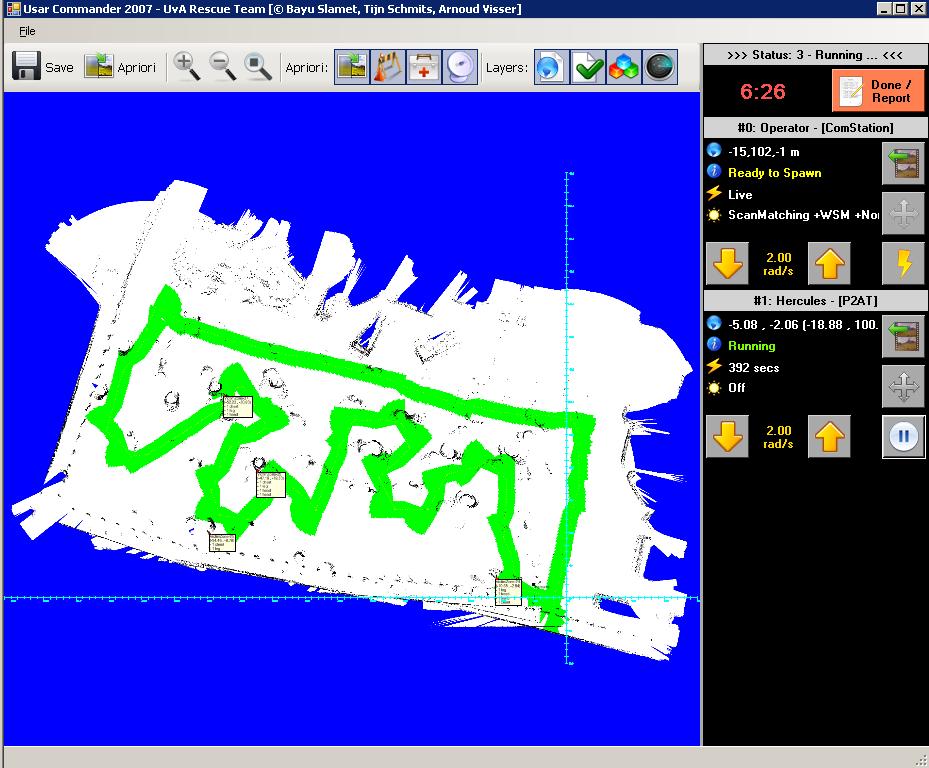
Indoor area, 4 robots, 283 m2.
This is the map we delivered for the first round of the semis. It demonstrates the
scalability of our system to 4 robots and also the robustness of our mapping algorithm that is
able to successfully merge the findings of 4 robots into a single high quality map.
|
 |
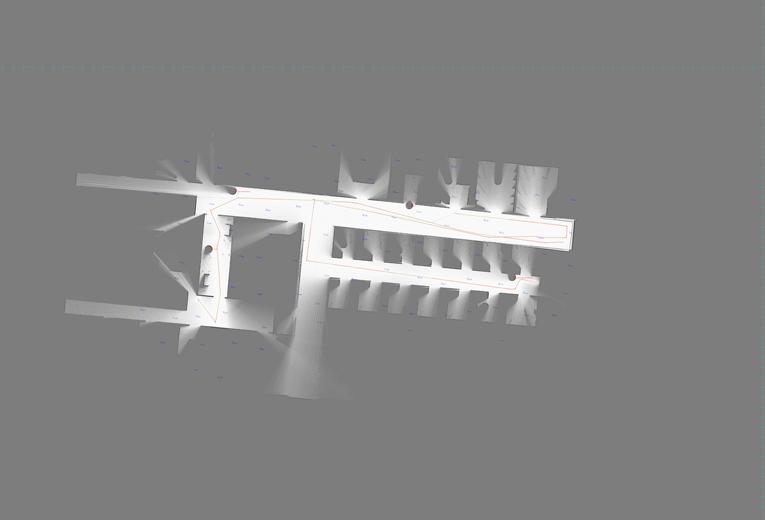
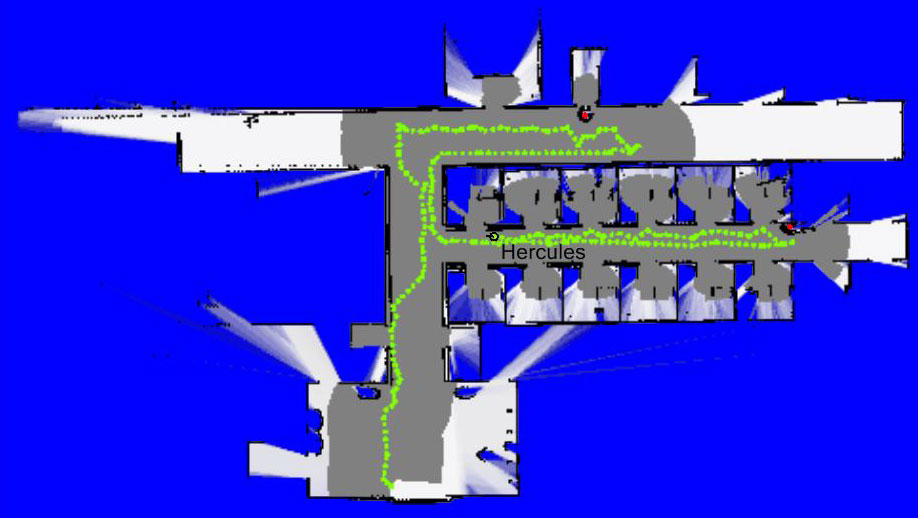
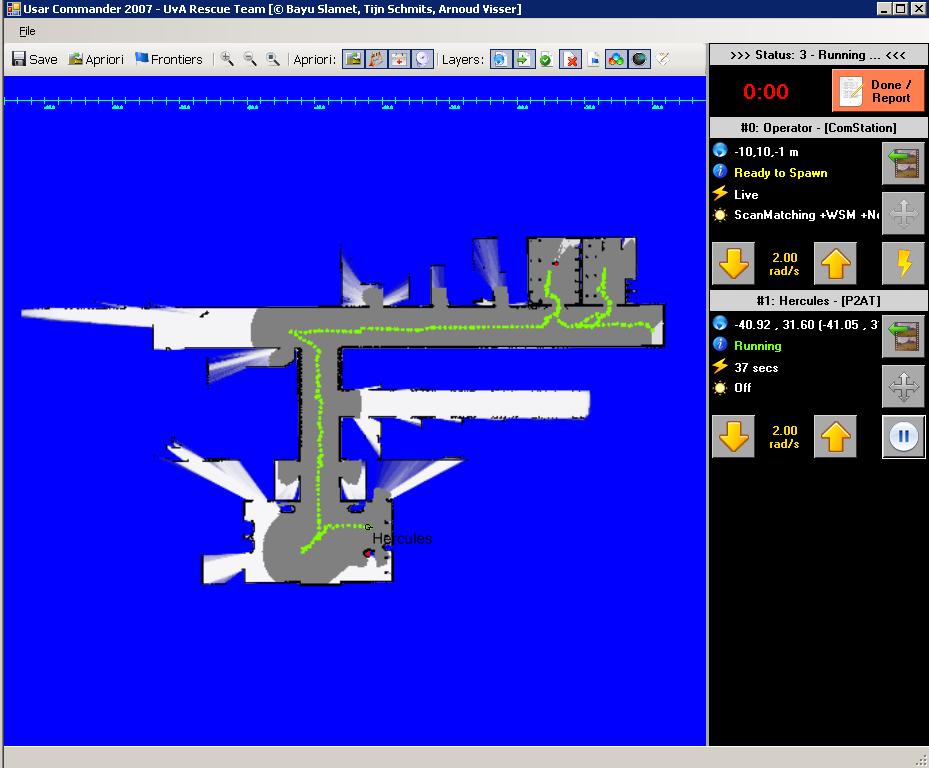
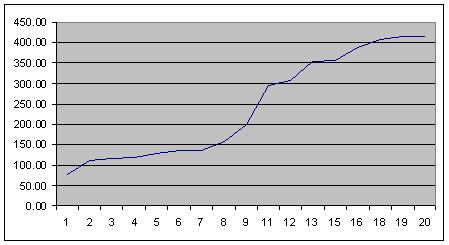
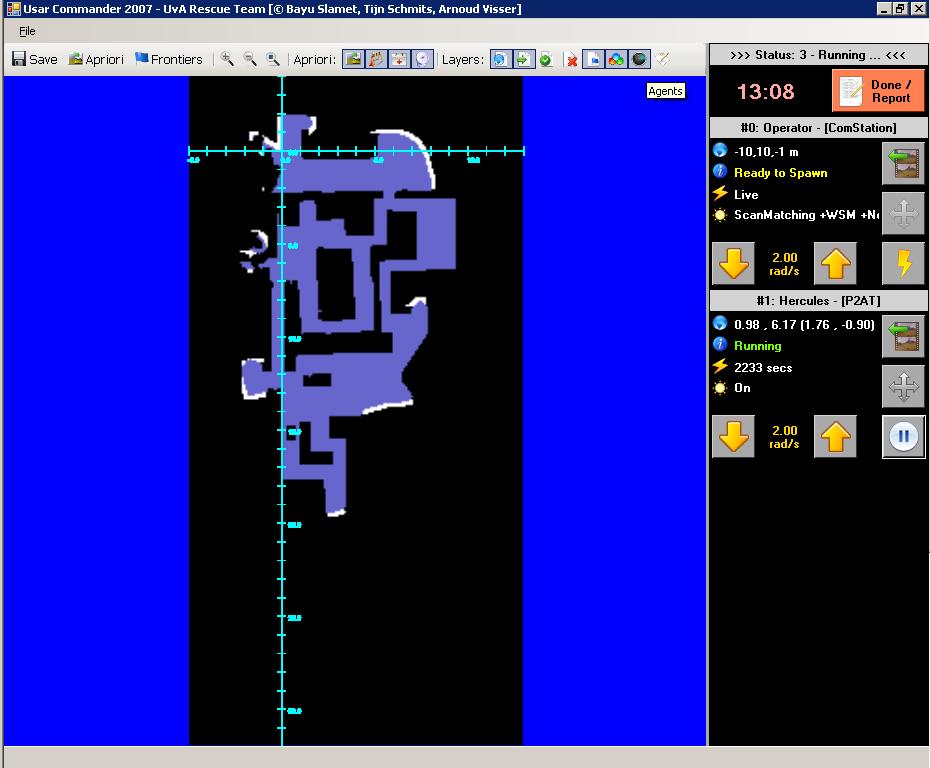
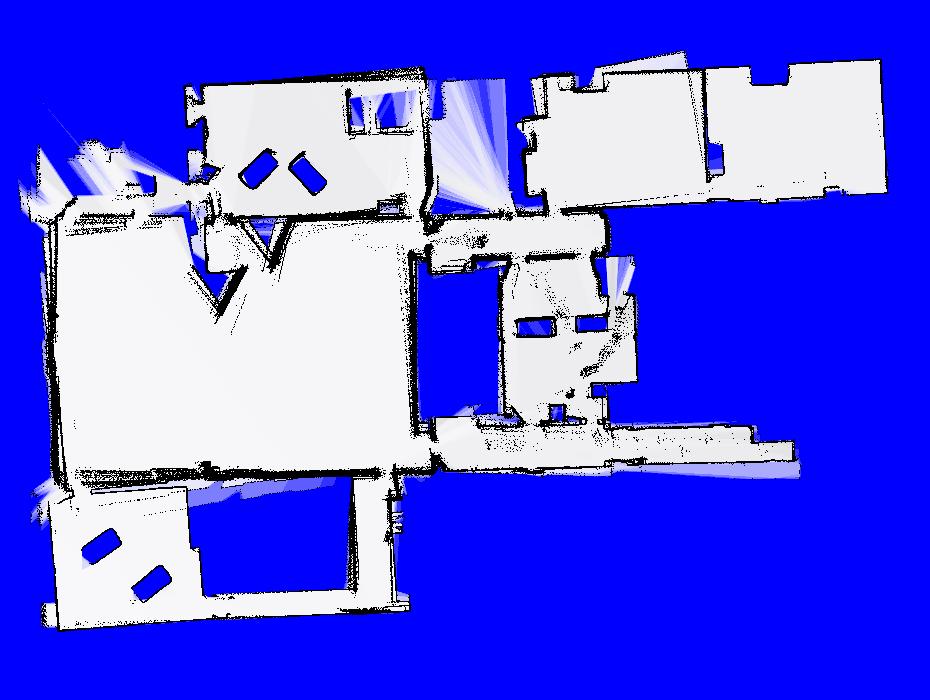
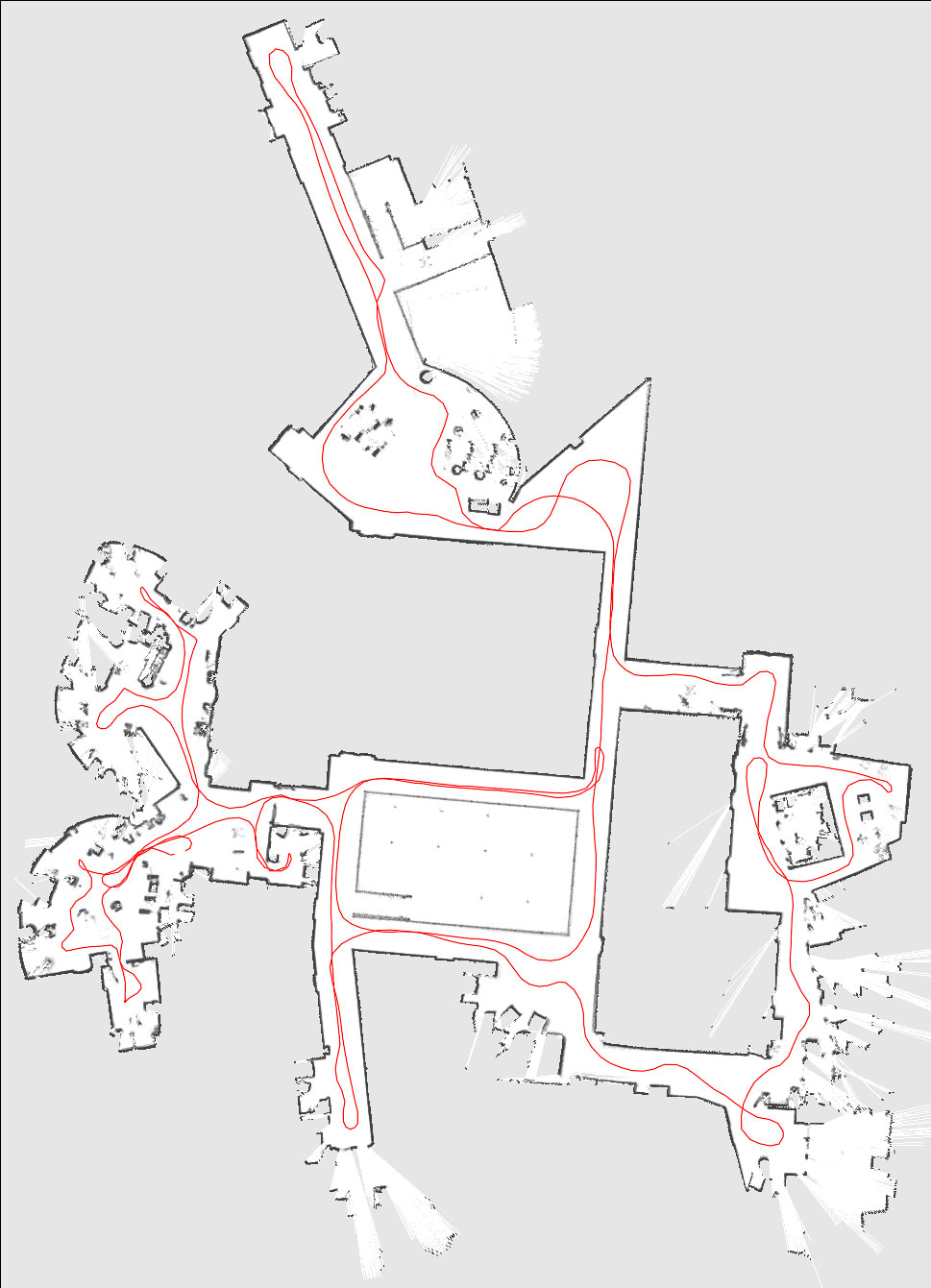
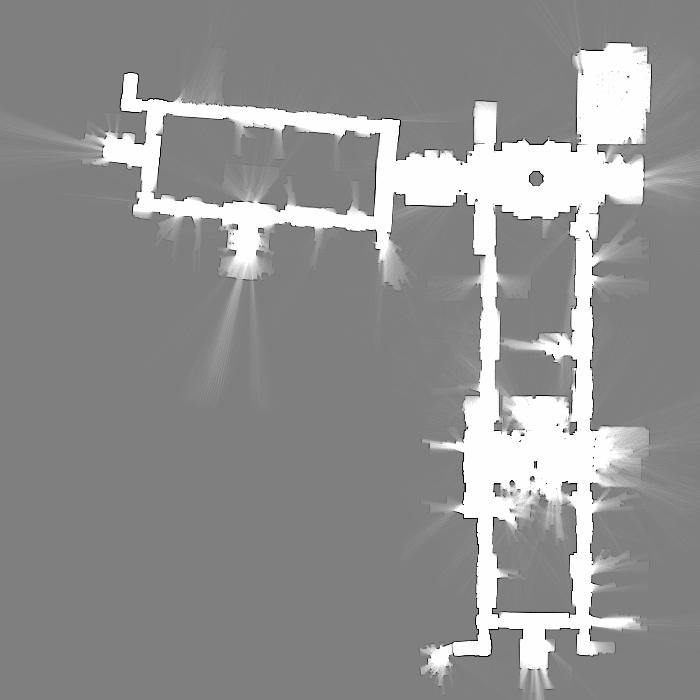
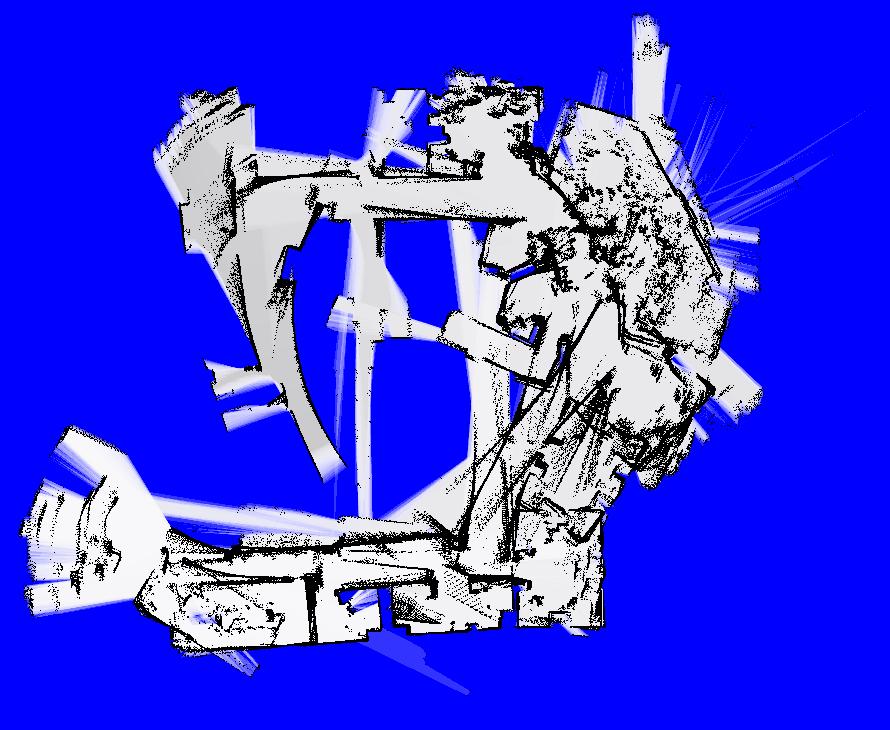
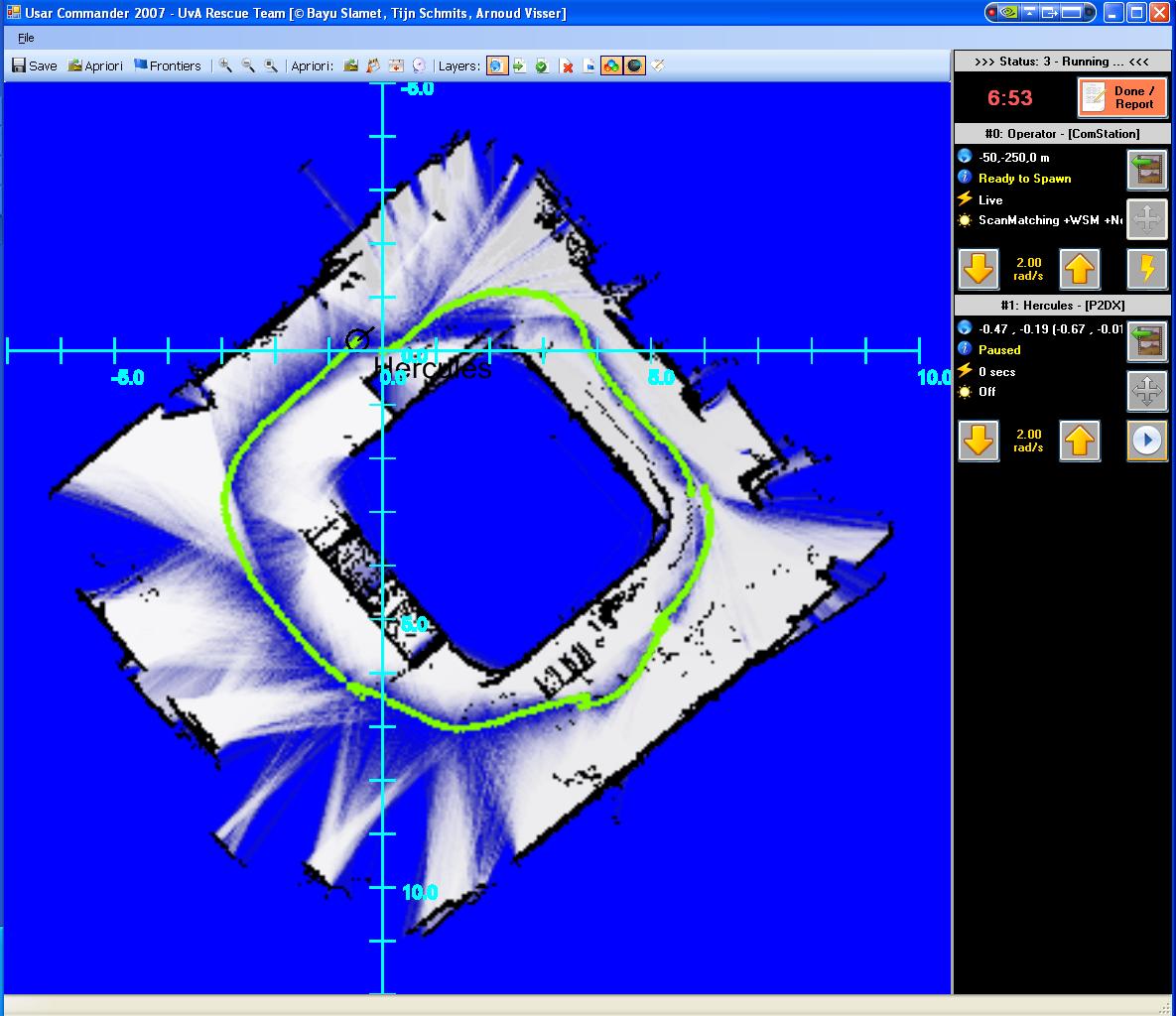
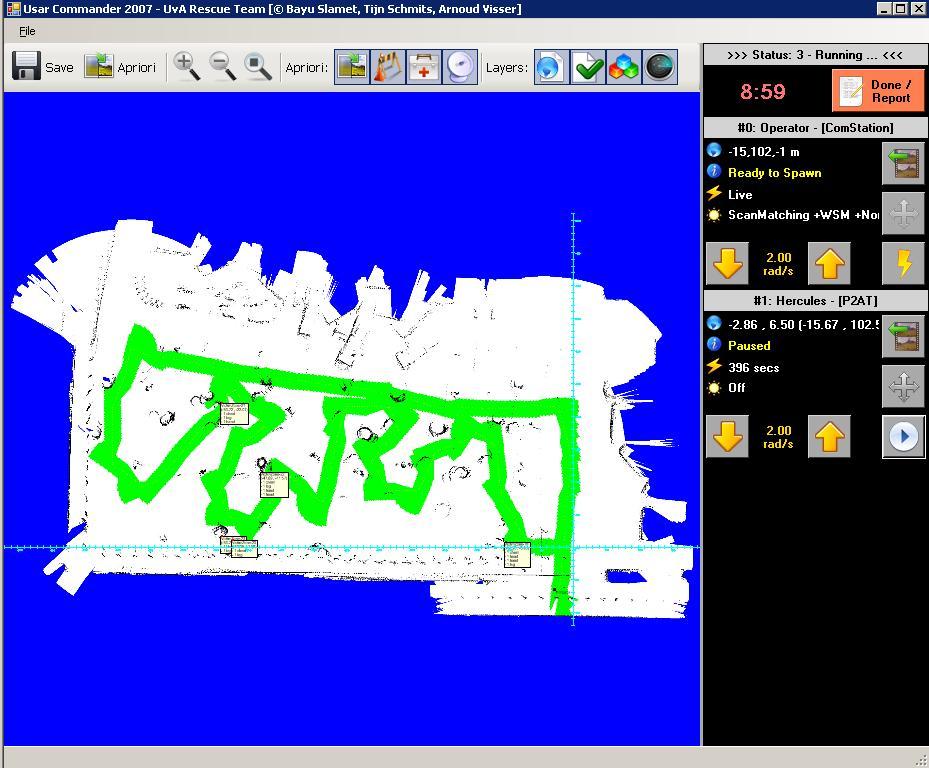
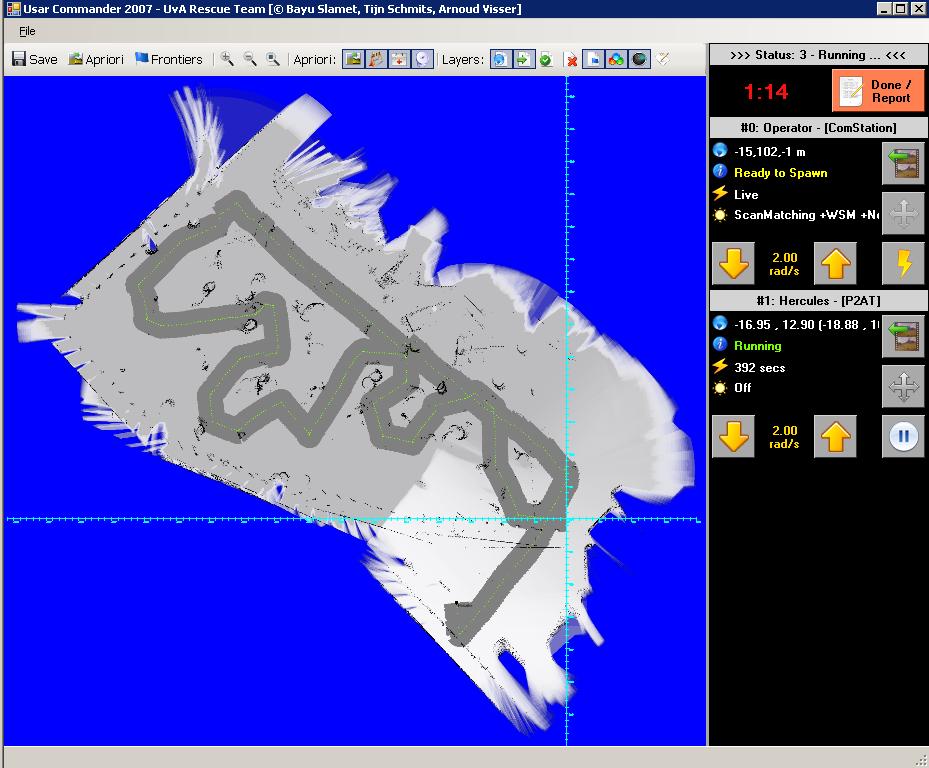
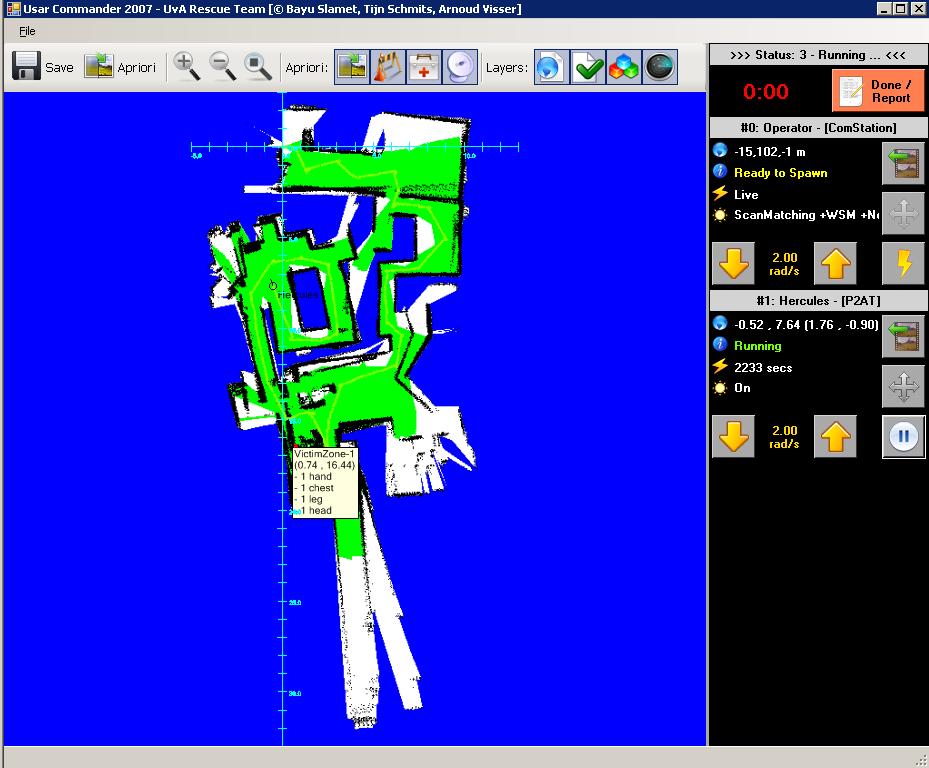
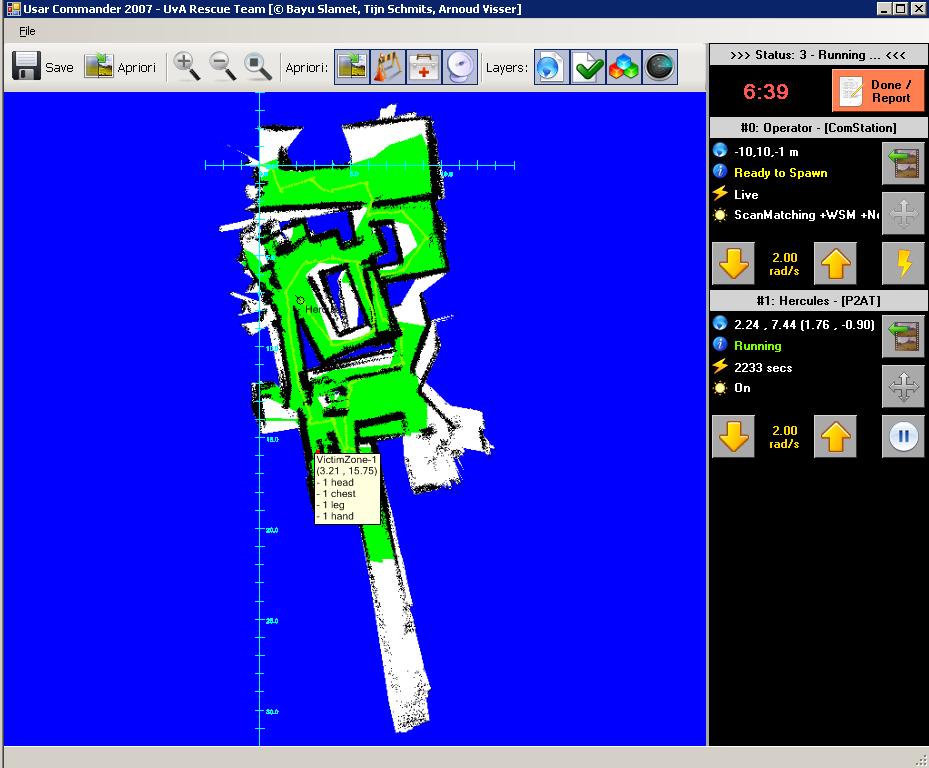
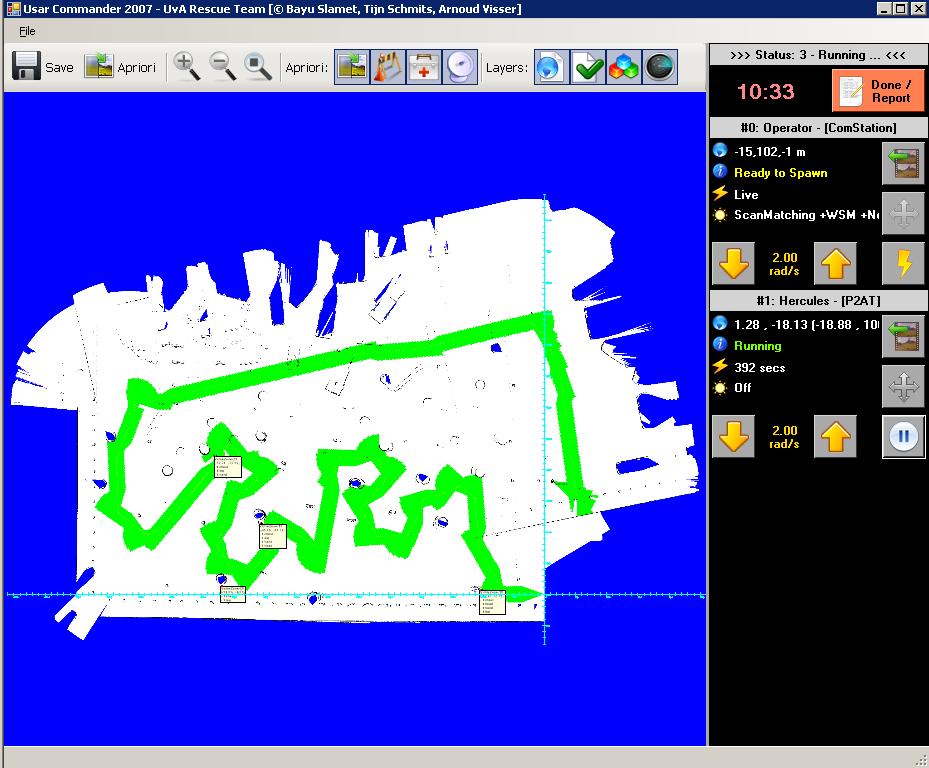
Outdoor area, 4 robots, 1431 m2.
This seemingly less quality map covers about 5 times the amount of area as we had until now.
Our robots were able to explore this much area by making effective use of their communication
capabilities. The robots that got furthest lost contact with the base-station due to the limited
range of the wireless network. However, our system is capable to reach beyond this limitatoin by
using robots as intermediate 'hubs'.
|
 |